
| |||||
|
[Japanese/English] |
ArchivesLast updated: Oct. 14, 2016
1.Technology
 Movie :An Object picking by using robot arms
Movie :An Object picking by using robot armsReferences: S.Akizuki and M.Hashimoto,Position and Pose Recognition of Randomly Stacked Objects using Highly Observable 3D Vector Pairs,Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society(IECON),pp.5266-5271,Dallas/U.S.A.,2014 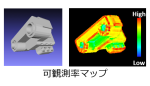 Movie :Simulate Observability of Object Surface
Movie :Simulate Observability of Object SurfaceReferences: S.Akizuki and M.Hashimoto, Stable Position and Pose Estimation of Industrial Parts using Evaluation of Observability of 3D Vector Pairs, Journal of Robotics and Mechatronics, Vol.27, No.2, pp.174-181, 2015/4. 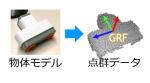 Movie :3D tracking of planar objects
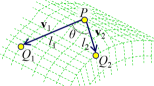
Movie :3D tracking of planar objectsReferences: S.Akizuki and M.Hashimoto, A Proposal of the Global Reference Frame for Surface Flatness-independent 3D Object Detection,Proceedings of Joint Conference of the International Workshop on Advanced Image Technology(IWAIT) and the International Forum on Medical Imaging in Asia(IFMIA),OS. 27,Tainan/Taiwan,2015.
2.Experimental Database
3.Presentation Document / List of Literature
Reference lists: Robust High-speed 3D object recognition based on Key-points 4.Resume of Graduation thesis and Master Thesis
▲Topへ  | ||||