ジェスチャー認識を用いたものまねロボットによるボクシング(山口)
デモの目標
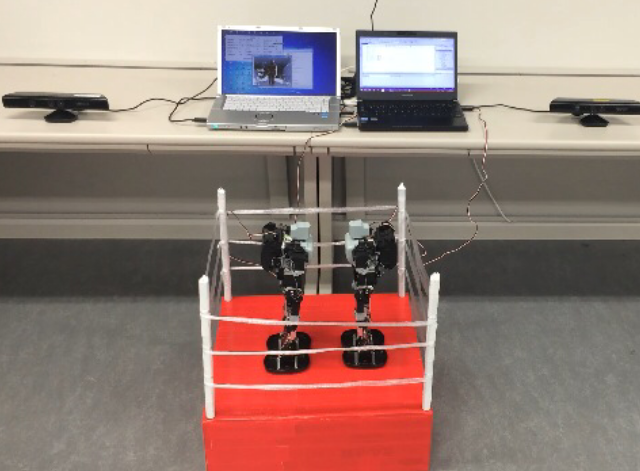
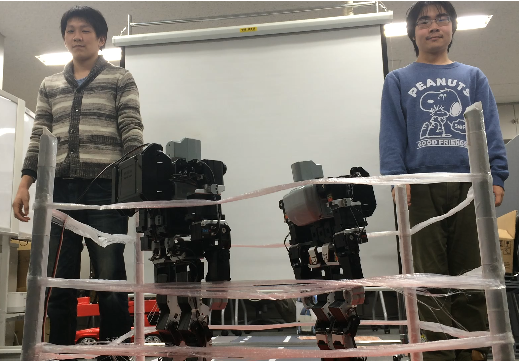
Kinectセンサで人間のジェスチャーを認識し,2台のロボットがボクシングするデモを完成させる.
デモの内容
1.人がボクシングのジェスチャーをおこなう.
2.Kinectで距離・骨格データを取得する.
3.骨格の距離データをもとにモータの回転角を計算する.
4.ロボットが人のジェスチャー通りに動く.
2.Kinectで距離・骨格データを取得する.
3.骨格の距離データをもとにモータの回転角を計算する.
4.ロボットが人のジェスチャー通りに動く.
デモ動画
感想
ロボットの肘の内転や外転のプログラムを書くことや,
歩行させるためのプログラムを書くことが大変であった.
最終的にロボットがボクシングするようになり,安心した.
デモコンを乗り越えたことが自分の自信になった.
歩行させるためのプログラムを書くことが大変であった.
最終的にロボットがボクシングするようになり,安心した.
デモコンを乗り越えたことが自分の自信になった.