Last updated: Apr. 23, 2019.
研究成果,および研究室所属の学部生による実習制作作品に関する動画を Youtube で公開しています.各画像をクリックすると Youtube で動画を再生します.
■研究成果デモ動画
3次元センシング技術 画像センシング技術 ヒューマンセンシング技術 その他の動画
■学部生による実習制作作品(教育成果)
2018年度 2017年度 2016年度 2015年度 2014年度 2013年度 2012年度 2011年度
2010年度 2009年度
新着動画
研究成果デモ動画
橋本研究室では,3次元センシング,画像センシング,ヒューマンセンシングの3つの研究領域において,先進的かつ実用的な研究を行っています.
ここでは,学会発表等で紹介したデモや実験に関する動画を公開しています.
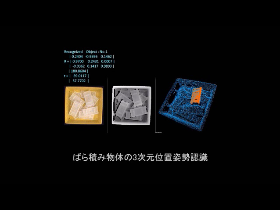
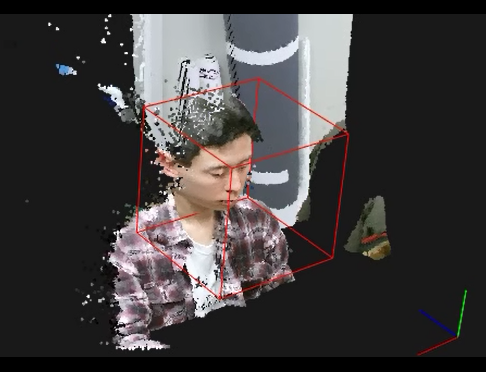
3次元センシング技術
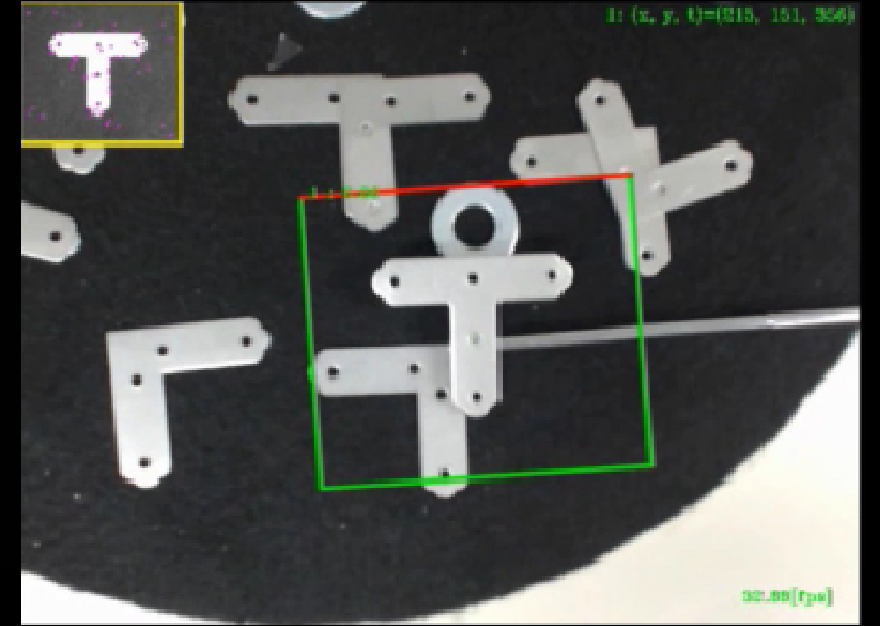
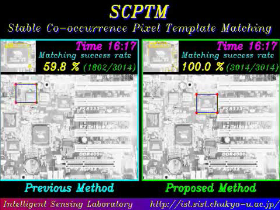
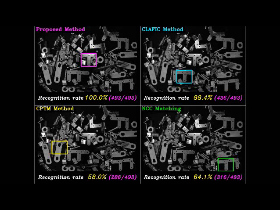
画像センシング技術
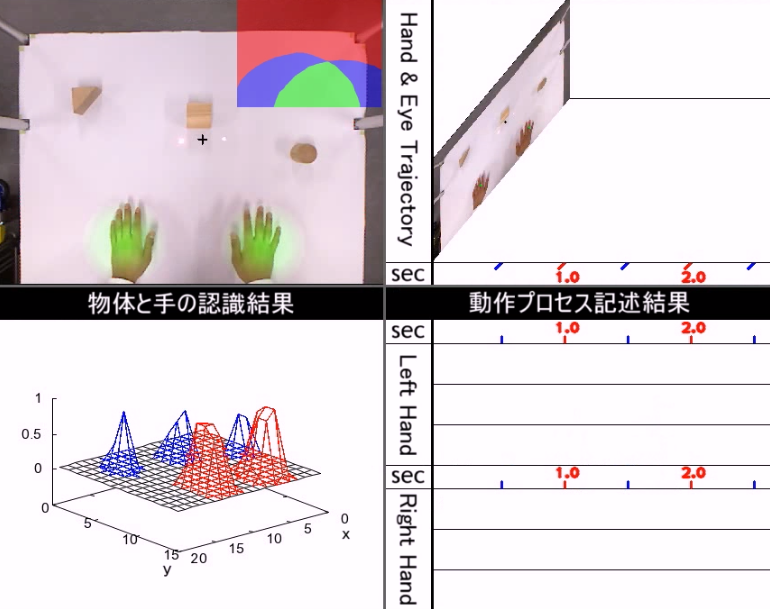
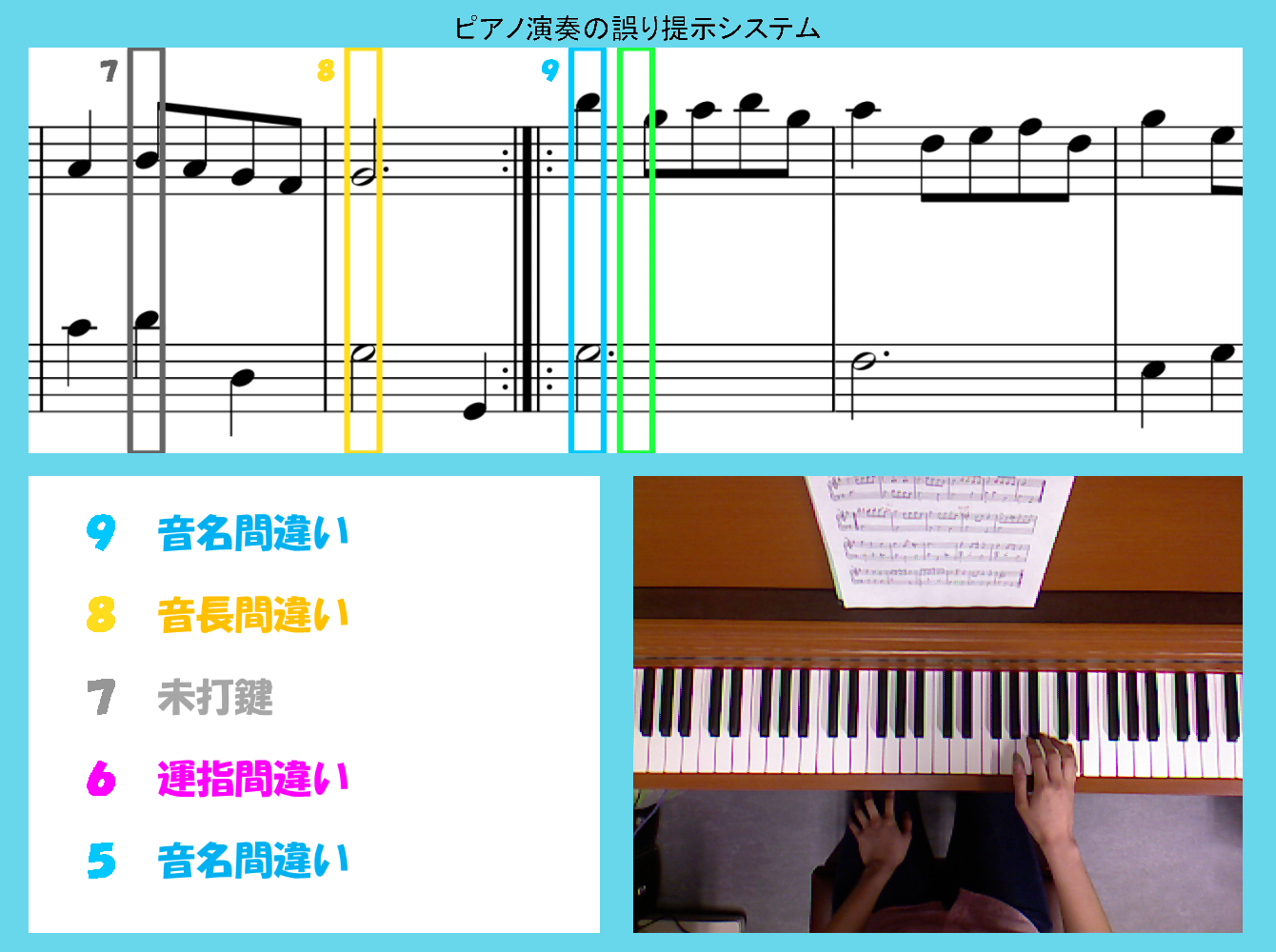
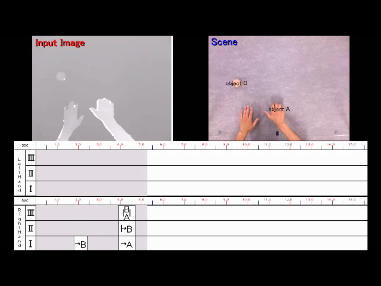
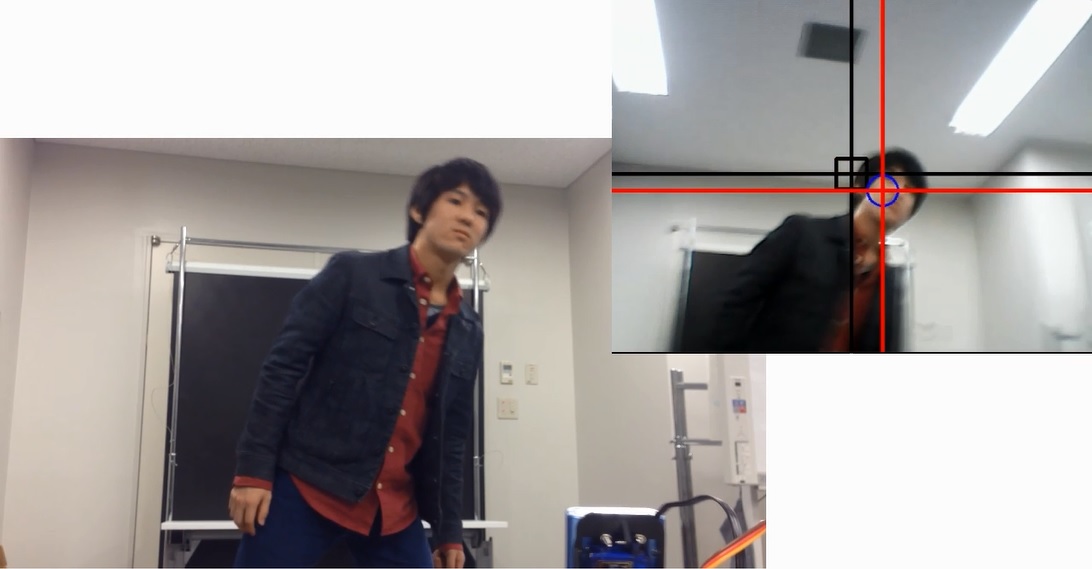
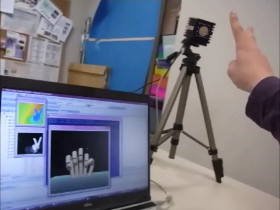
ヒューマンセンシング技術
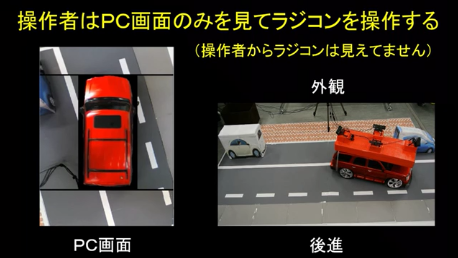
その他の動画
橋本研究室1分間紹介
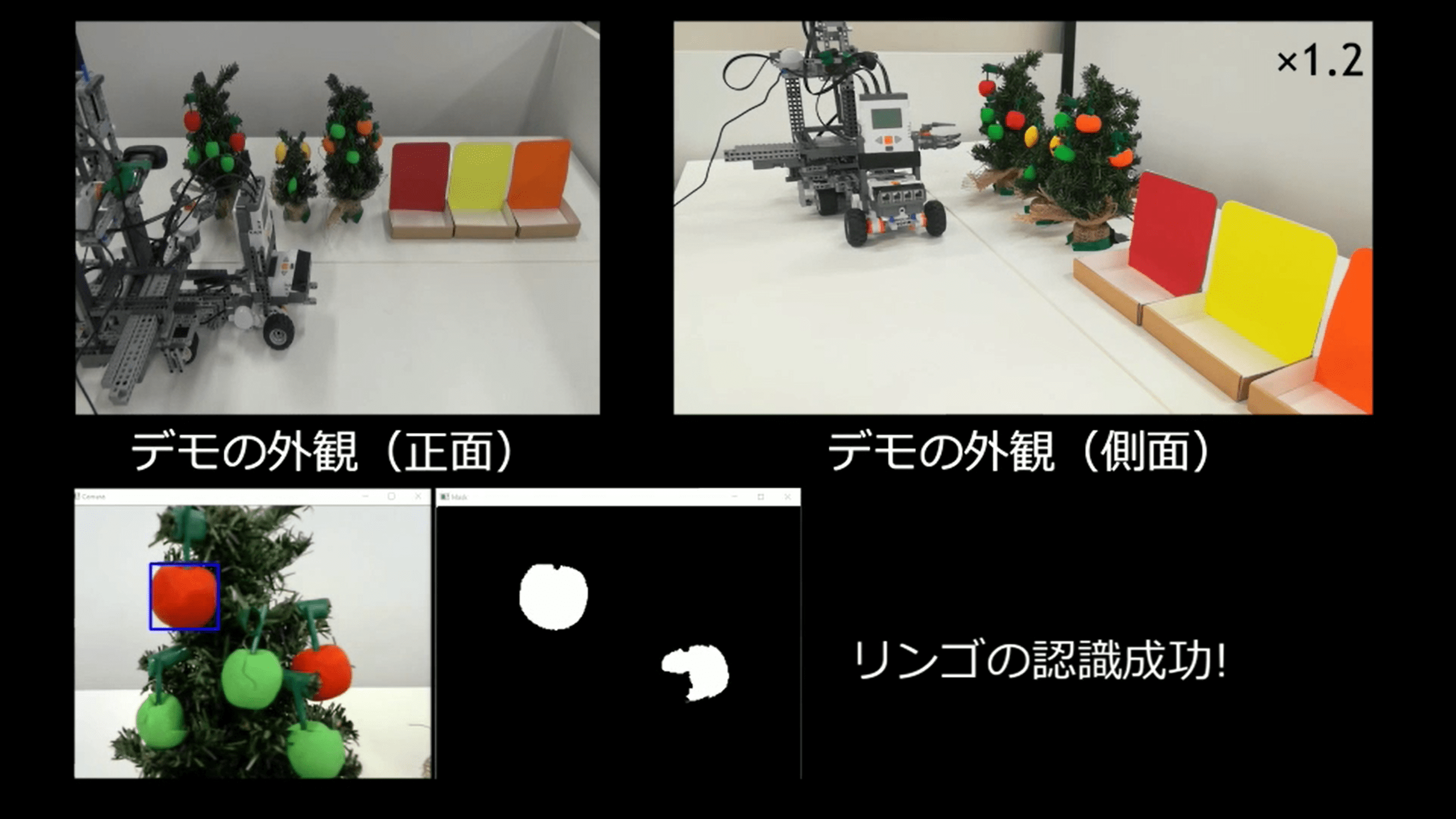
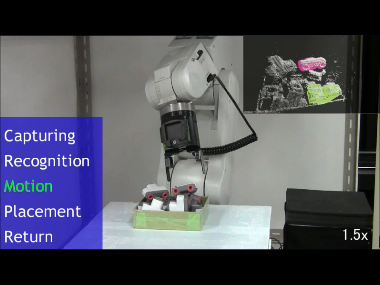
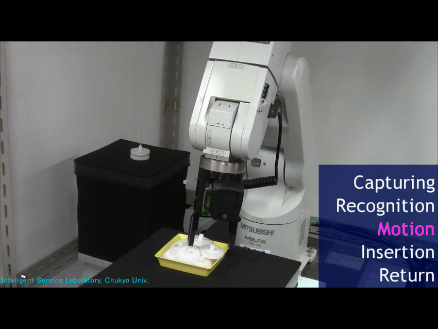
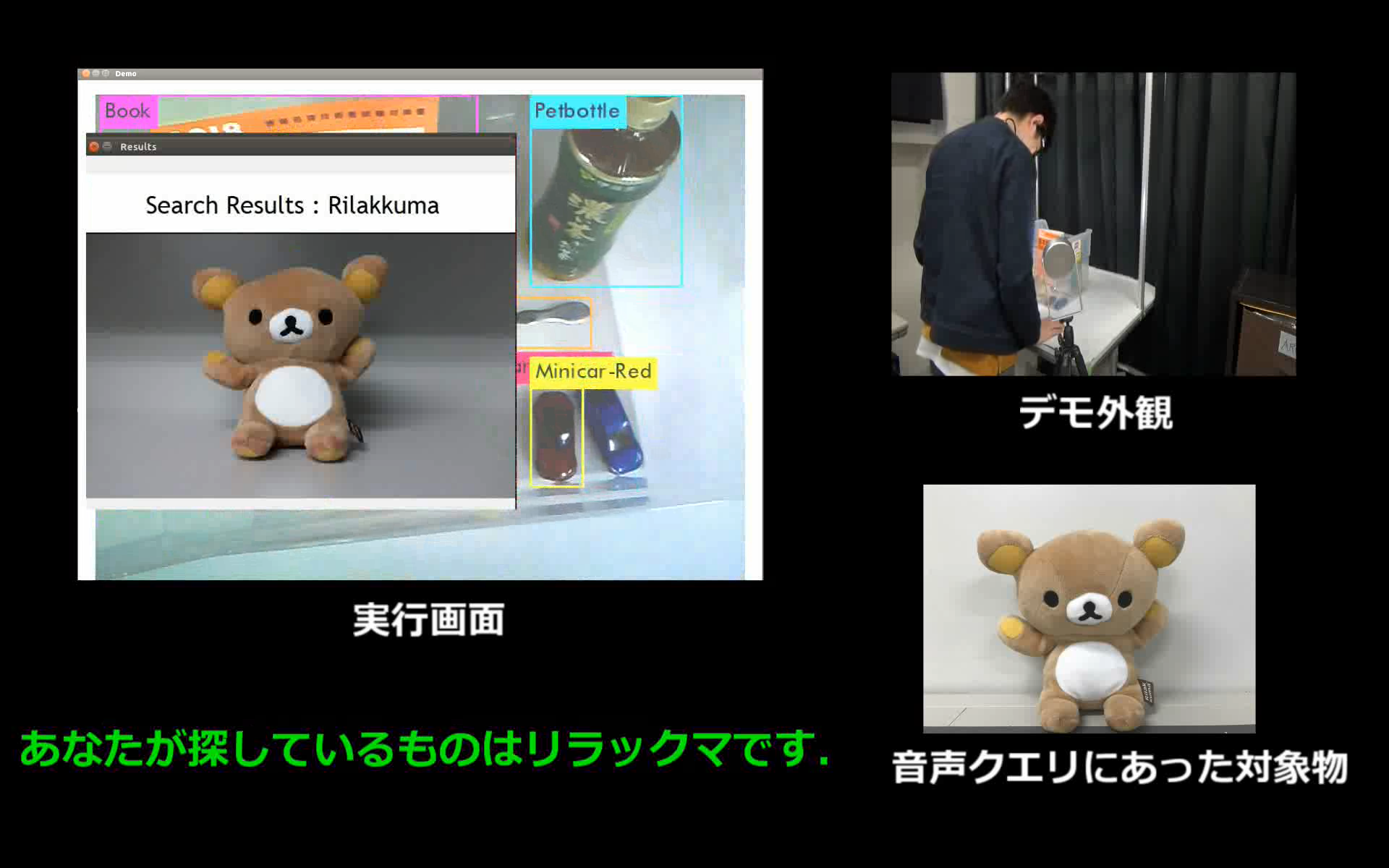
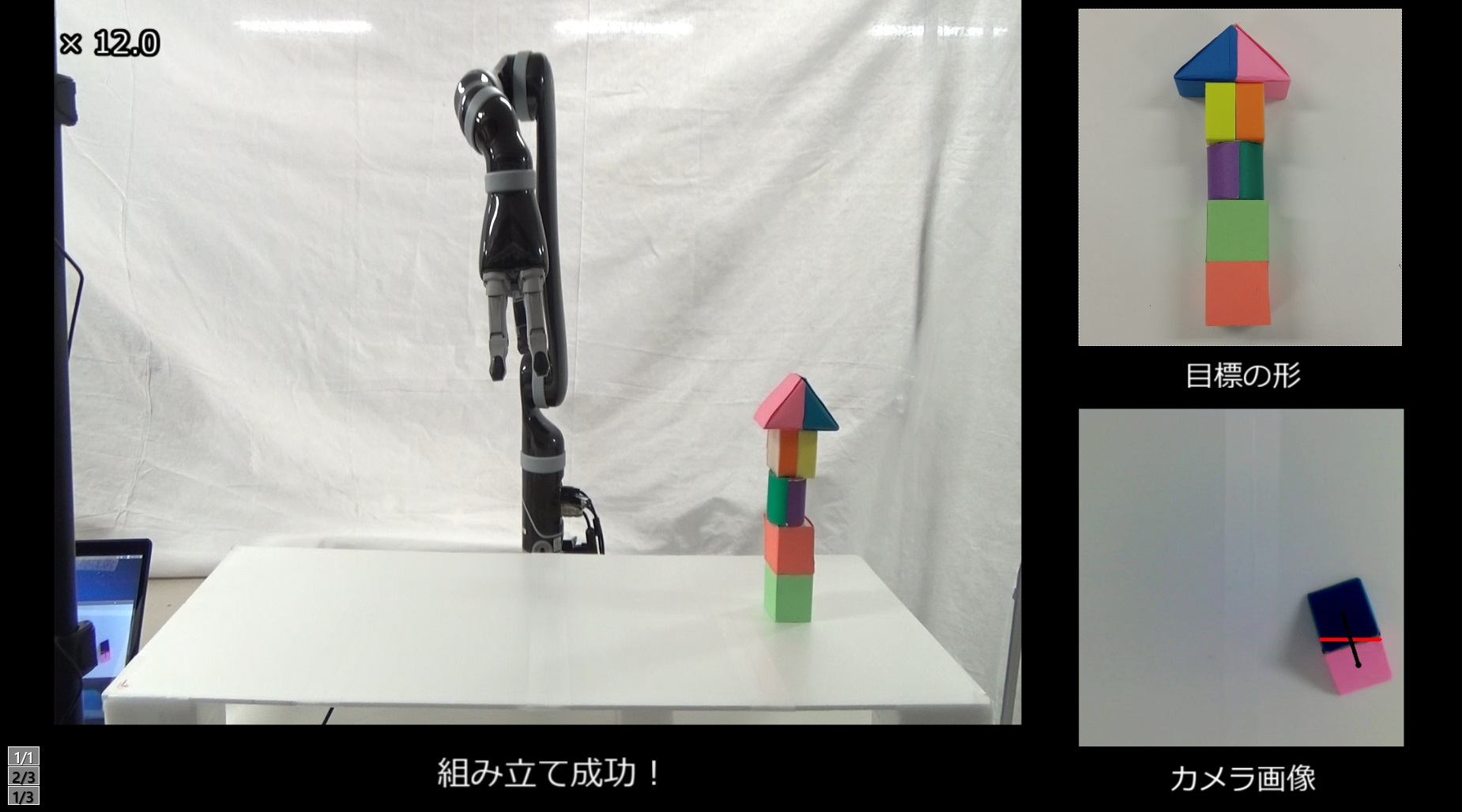
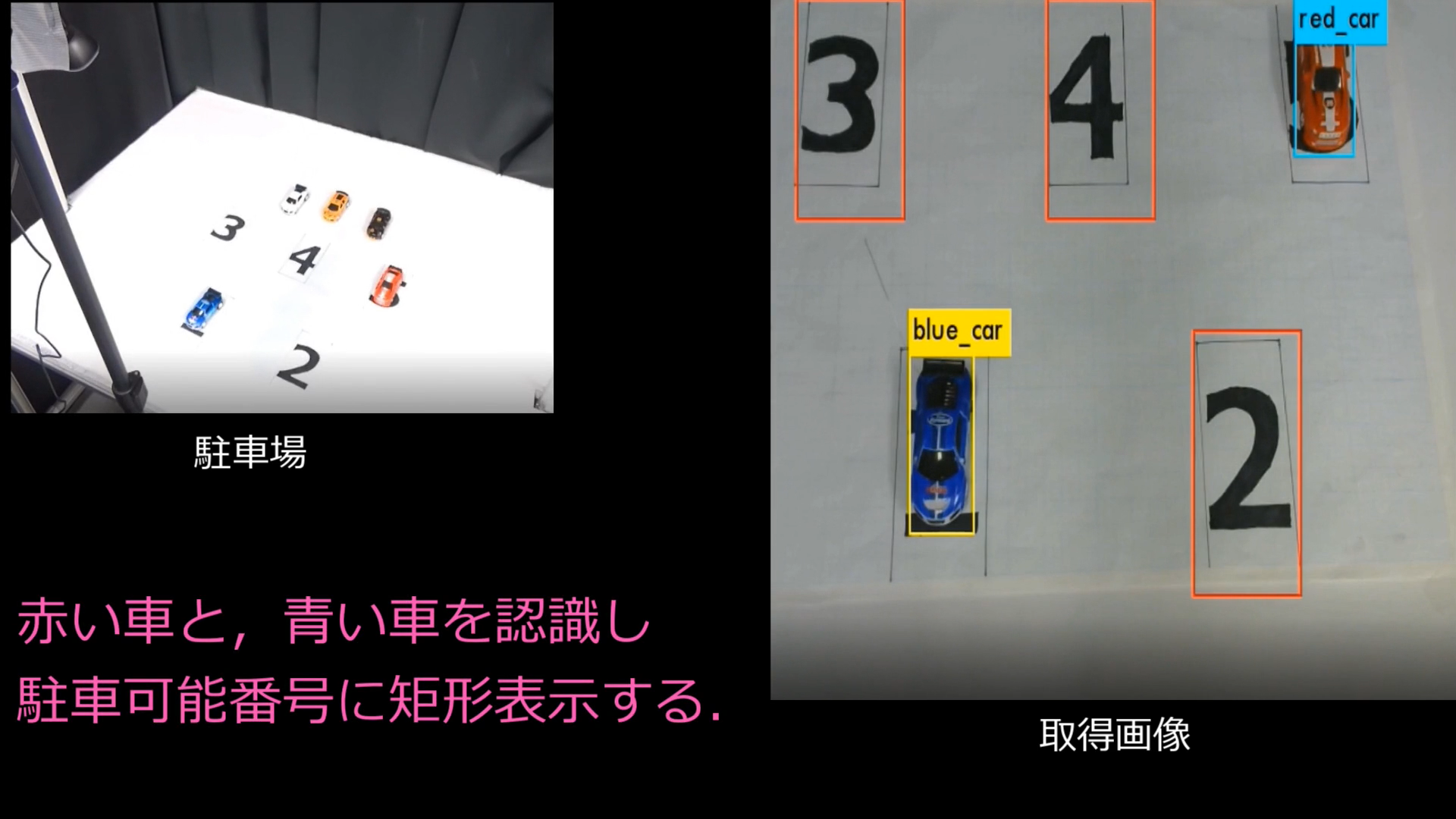
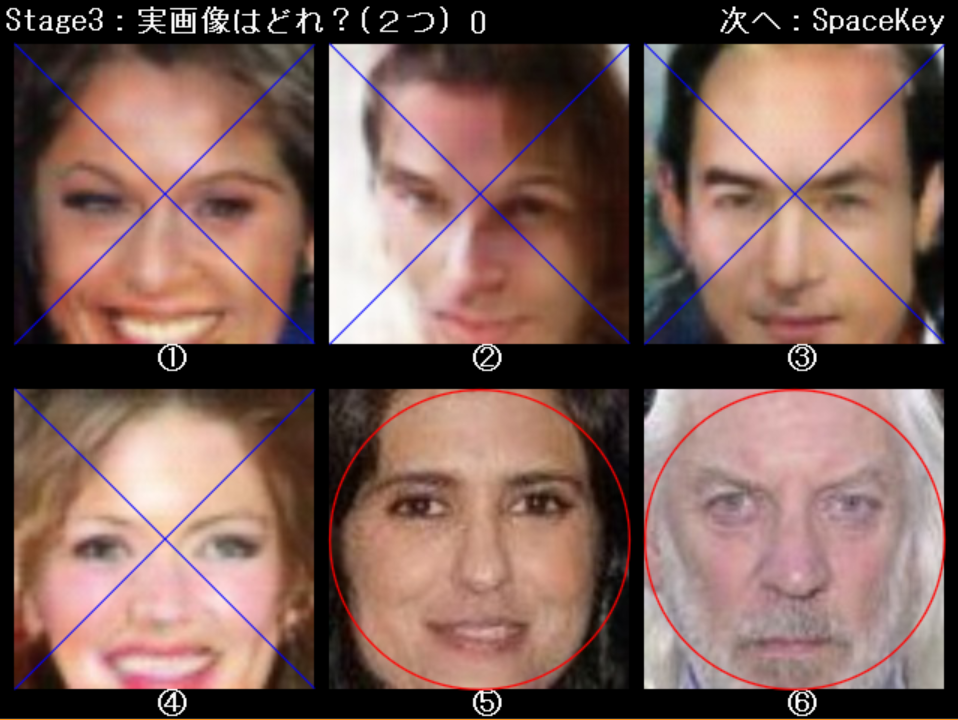
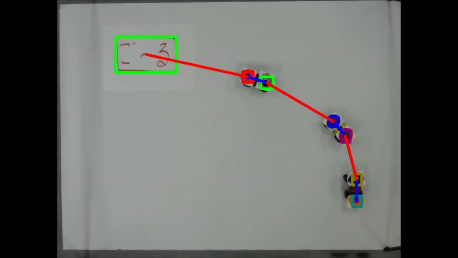
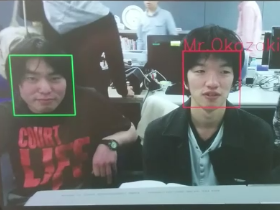
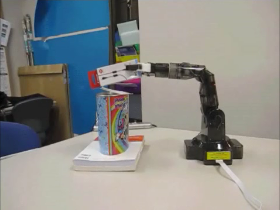
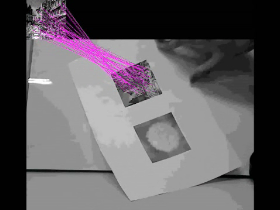
(物体検出技術) |
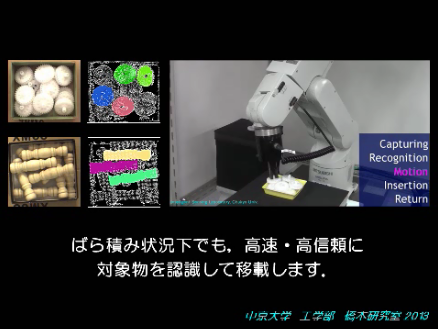 |
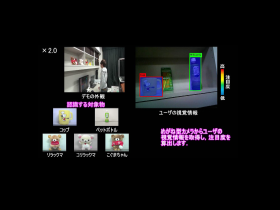
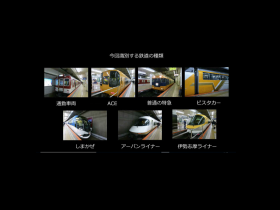
| 中京大学橋本研における物体検出に関する研究成果です.ロボットセンシングに関する技術を3種類ご紹介します. |
|
学部生による実習制作作品
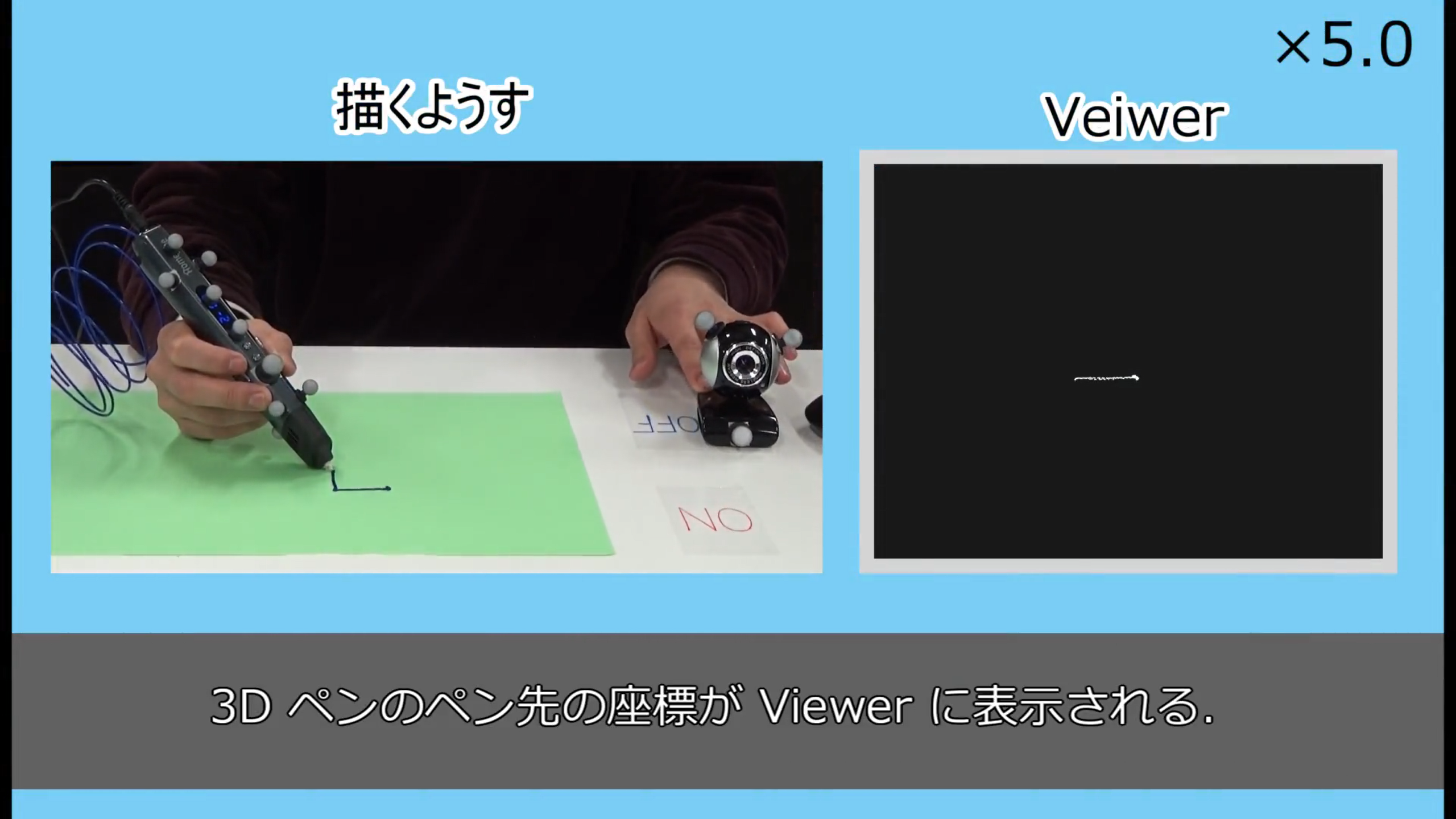
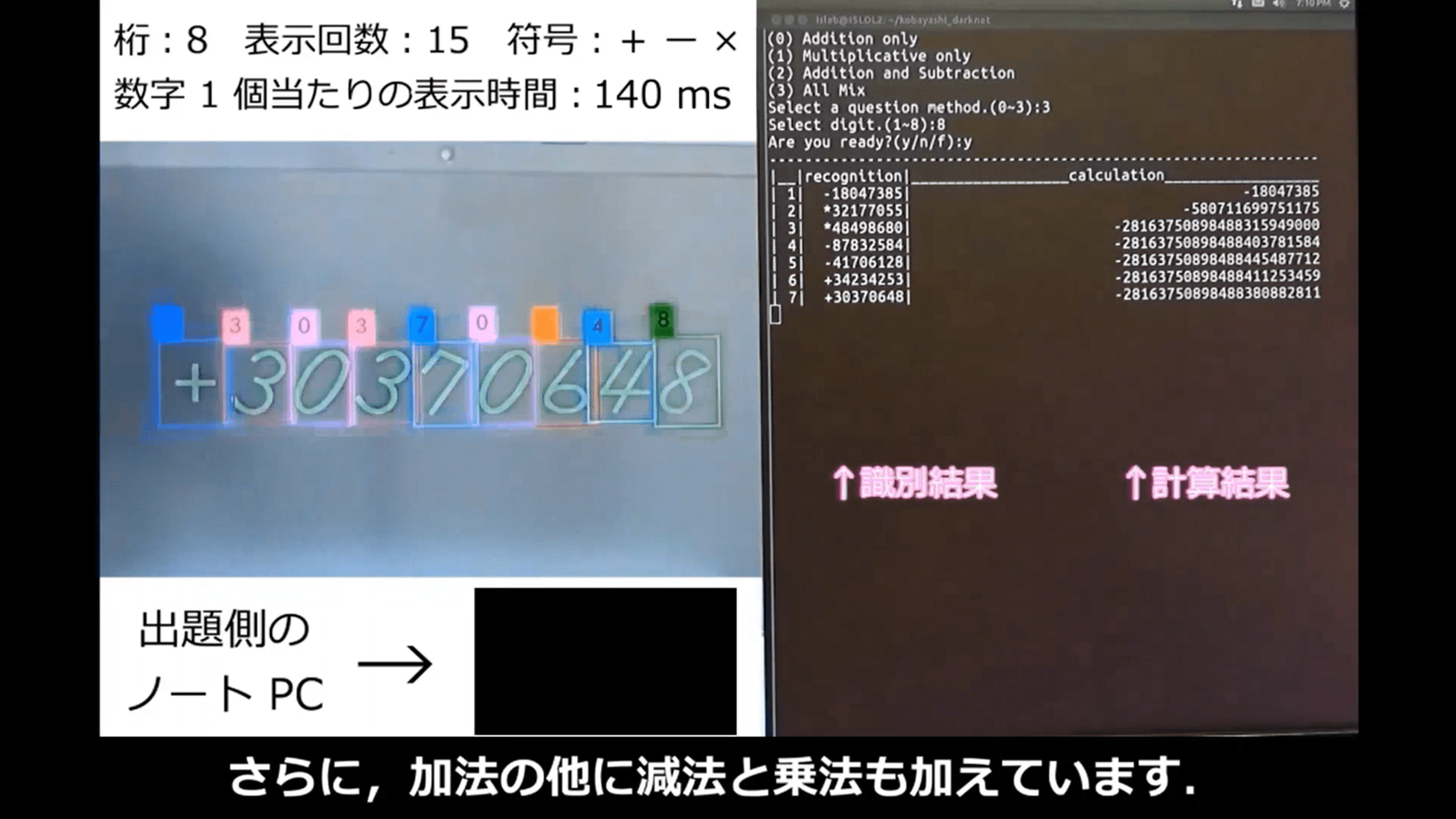
橋本研究室では,研究室に配属された学部生に対して,ロボット制御や画像処理,情報処理全般に関する 基礎および応用教育を実施しています.ここでは,学部生(主に2年生)が実習授業で制作した数々の作品 を公開しています.
2018年度
2017年度
2016年度
2015年度
2014年度
2013年度
2012年度
2011年度
2010年度
2009年度
▲Topへ
Copyright(C)2010 – Hashimoto Lab., All rights reserved