ビュートローバーRTC-BTによる「尻尾取りゲーム」(高橋)
デモの目標
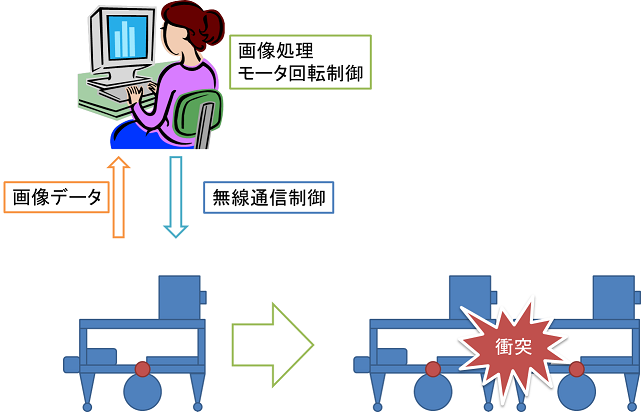
無線webカメラ,ARMマイコンを搭載したビュートローバーRTC-BTを用いて「尻尾取りゲーム」を行う.
ビュートローバー3台のうち,2台は髙橋・佐藤による無人機.1台は無線コントローラによる操作を可能とし,ゲーム性を持たせる.
ビュートローバー3台のうち,2台は髙橋・佐藤による無人機.1台は無線コントローラによる操作を可能とし,ゲーム性を持たせる.
デモの内容
<ルール>
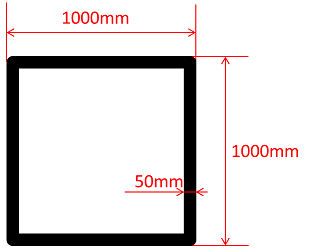
・1メートル四方のフィールド(縁50mmを黒塗り)を使用する.
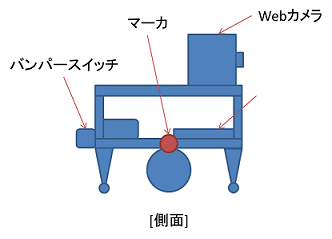
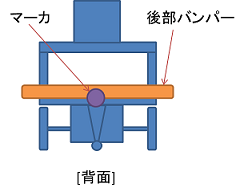
・車体の後部にバンパーとスイッチを設置し,そこに衝突された機体の負けとする.
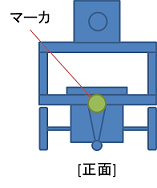
・各車体のマーカを4つ設置(前後左右)するが,それぞれ別の色を使う.
・無線webカメラ,メインフレーム,ARMマイコンなどは共通のものを使い,それ以外の基本
パーツからのカスタマイズは認める.
・フィールド縁の黒エリアに侵入した機体は,画像処理の結果に関わらず,無条件でフィール
ド中央に向かって一定距離進む.(フィールドアウトペナルティ)
・負けた方の機体はLEDを光らせるなどして合図する.
・1メートル四方のフィールド(縁50mmを黒塗り)を使用する.
・車体の後部にバンパーとスイッチを設置し,そこに衝突された機体の負けとする.
・各車体のマーカを4つ設置(前後左右)するが,それぞれ別の色を使う.
・無線webカメラ,メインフレーム,ARMマイコンなどは共通のものを使い,それ以外の基本
パーツからのカスタマイズは認める.
・フィールド縁の黒エリアに侵入した機体は,画像処理の結果に関わらず,無条件でフィール
ド中央に向かって一定距離進む.(フィールドアウトペナルティ)
・負けた方の機体はLEDを光らせるなどして合図する.
<フィールド外観図>
<車体外観図>
<デモの流れ>
デモ動画
感想
Open-RTMという慣れない開発環境に苦労しましたが,それでも頑張ってプログラムを書いて,初めてビュートローバーが動いた時には感動しました.
このデモコンを通じて,組み込みCPUのプログラム開発能力や画像処理技術などがより一層強化されました.この経験を今後の卒業研究に活かしたいと考えています.
このデモコンを通じて,組み込みCPUのプログラム開発能力や画像処理技術などがより一層強化されました.この経験を今後の卒業研究に活かしたいと考えています.