自動ピッキングクレーンゲーム(伊藤)
デモの目標
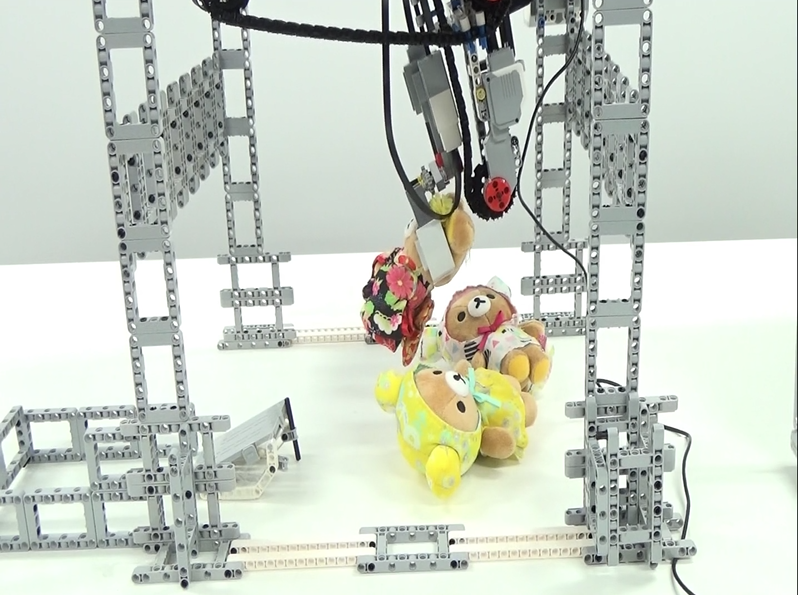
物体を認識し,自動で対象物を把持しに行くクレーンゲームを開発する.
デモの内容
1.対象物を選択する.
2.1.で選択した対象物のところまで自動でアームを動かす.
3.対象物を把持し,指定の場所まで持っていく.
2.1.で選択した対象物のところまで自動でアームを動かす.
3.対象物を把持し,指定の場所まで持っていく.
デモ動画
感想
ハードとソフトを組み合わせるという経験が初めてで楽しかった.
この経験を今後活かしていきたい.
この経験を今後活かしていきたい.