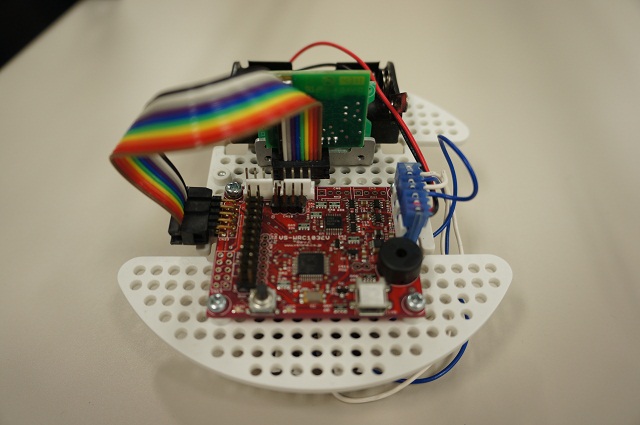
PCによるビュートローバーのモータ制御(佐藤)
デモの目標
PCからモータ回転速度のデータをビュートローバーに送信し制御する.
デモの内容
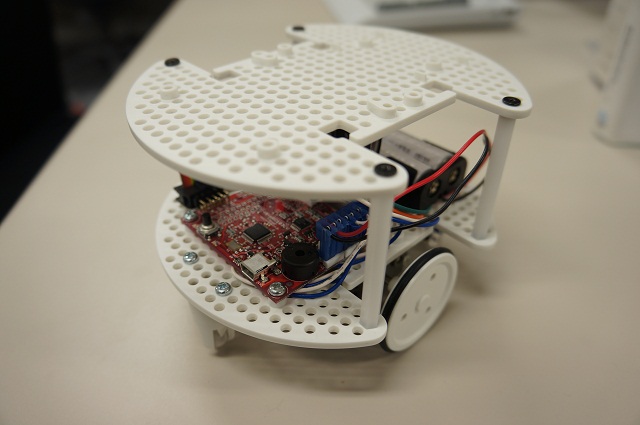
PCにモータの回転速度を入力し,
ビュートローバ―を前進,後進,右や左に進むなどの行動をリアルタイムで自由自在に制御する.
ビュートローバ―を前進,後進,右や左に進むなどの行動をリアルタイムで自由自在に制御する.
デモ動画
感想
C++やOpenRTM-aist,はんだ付けなどのソフトウェアとハードウェア両方の知識を得ることができた.
また,物を作り上げること,目標を達成することの難しさとともに,物を作ることの楽しさを身に染みて感じた.
この経験を生かしてこれからの人生を一生懸命過ごしていこうと思います.
また,物を作り上げること,目標を達成することの難しさとともに,物を作ることの楽しさを身に染みて感じた.
この経験を生かしてこれからの人生を一生懸命過ごしていこうと思います.