kinectを用いたロボットアームMELFAのジェスチャー操作(橋本)
デモの目標
3次元センサkinectにより人間のジェスチャーを認識し,ロボットアームMELFAを操作する.
デモの内容
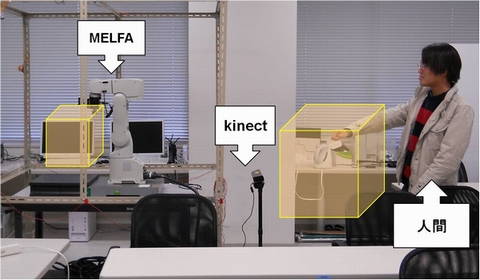
人間が手を黄色の直方体の範囲内で動かすと,3次元センサkinectが人間の手の座標を認識する. その認識した絶対座標によりロボットアームMELFAが動く.
デモ動画
感想
kinectやMELFAを操作するプログラムはC++で,今まで使ったことのない言語であり,苦労した. また,kinectとMELFAを同時に制御するプログラムには,かなりの時間を費やしてしまった. しかし今回,kinectやMELFAをつなげる最も基本的な部分の開発に成功し,とても嬉しい. このデモは,もっとリアルタイムに制御したり,MELFAのハンドを使うなど,今後色々と発展できるものであると思う. 現在,認識率の向上,MELFAのハンドの利用など改良中!完成したら,またアップするのでお楽しみに.