エンコーダレスロボットアームのビジュアルフィードバック制御(岡)
エンコーダを追加することなく,カメラからの位置情報だけで,
対象物をハンドリングさせるためのシステム開発.
エンコーダーレスロボットアーム「MR-999」の5軸を制御する.
対象物をハンドリングさせるためのシステム開発.
エンコーダーレスロボットアーム「MR-999」の5軸を制御する.

MR-999
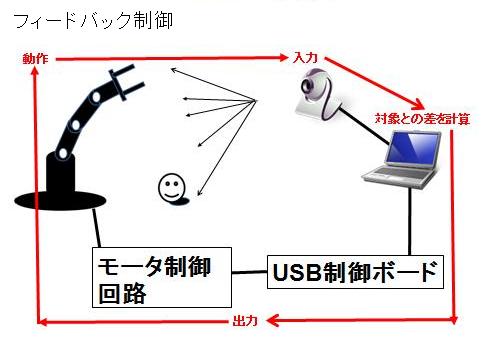
アーム型ロボット「MR-999」の5軸関節モーターをPCからUSB経由で自由自在に動作させる.
その際,関節部に配置したマーカをカメラで撮影して位置検出し,
その結果をフィードバックさせることによって物体を自動的につかむ.
ロボットアームMR999動作
【動画】