道路標識認識によるLEGO Mindstormsの自律走行(大野)
デモの目標
LEGO Mindstormsを用いて,道路標識を認識しその標識に従い自律走行するロボットを作る.
デモの内容
<開発したシステムの構成> 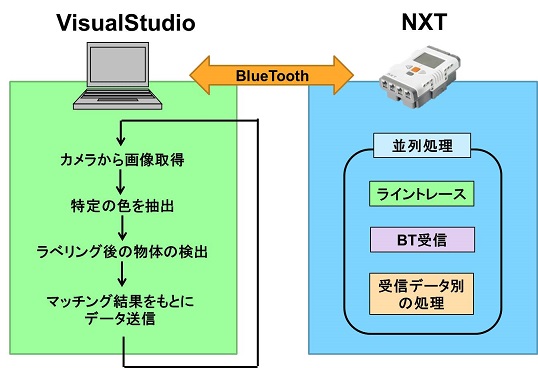

白黒を判別するセンサを用い,黒い部分に侵入しないように走行する.
カメラから得た画像内に上記の標識が存在すれば,標識下にある処理を行う.
この2つを組み合わせることで,道路標識を認識し自律走行するシステムが成立した.
デモ動画
感想
OpenCVやビジュアルフィードバック制御を学べました.
カメラやBluetoothの通信の部分がうまくいかず大変でした.
計画通りには進まないので,とにかくやれることは早いうちにやることが大切だということがよくわかりました.
カメラやBluetoothの通信の部分がうまくいかず大変でした.
計画通りには進まないので,とにかくやれることは早いうちにやることが大切だということがよくわかりました.