LEGO-MindStormsによる2次元マーク認識(北村)
デモの目標
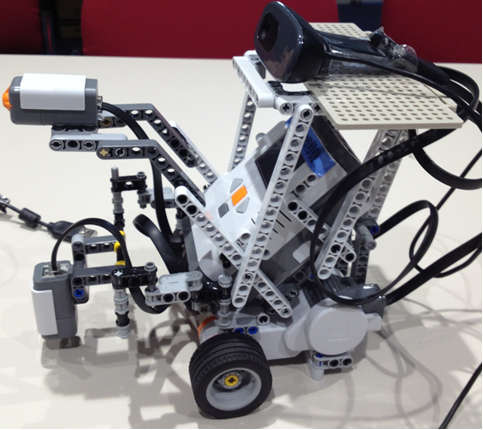
LEGO-Mindstorms自動走行ロボットを作り,カメラで矢印を認識してその方向に走る.
デモの内容
1.自動走行ロボットと自作の二色の矢印を用意する.
2.OpenCVによる画像処理プログラムとNXTを起動する.
3.ロボットを走行させ,矢印の書いてある看板に触れさせ,タッチセンサーが反応したら止まらせる.
4.矢印の色を認識させる.
5.受け取った色データにより走行ロボットの向きを変え,その方向にまっすぐ走らせる.
6.3~5を繰り返す.
2.OpenCVによる画像処理プログラムとNXTを起動する.
3.ロボットを走行させ,矢印の書いてある看板に触れさせ,タッチセンサーが反応したら止まらせる.
4.矢印の色を認識させる.
5.受け取った色データにより走行ロボットの向きを変え,その方向にまっすぐ走らせる.
6.3~5を繰り返す.
デモ動画
感想
このデモコンを通して,visual feedbackの技術やOpenCVの知識を得ることができた.
当初の計画通りには全く進まず,後ろにずれ込んでしまい大変だった.
最後まであきらめずに試行錯誤を繰り返し,何とか完成した.
完成したときは本当にうれしかった.素晴らしい経験だと思った.
この経験を卒研などに活かしていきたいと思う.
当初の計画通りには全く進まず,後ろにずれ込んでしまい大変だった.
最後まであきらめずに試行錯誤を繰り返し,何とか完成した.
完成したときは本当にうれしかった.素晴らしい経験だと思った.
この経験を卒研などに活かしていきたいと思う.