新型Mindstorm(EV3)を用いた自動走行ロボット(川口)
デモの目標
Webカメラから得られる情報をもとに自動走行するロボットを作成する.
デモの内容
内容1:
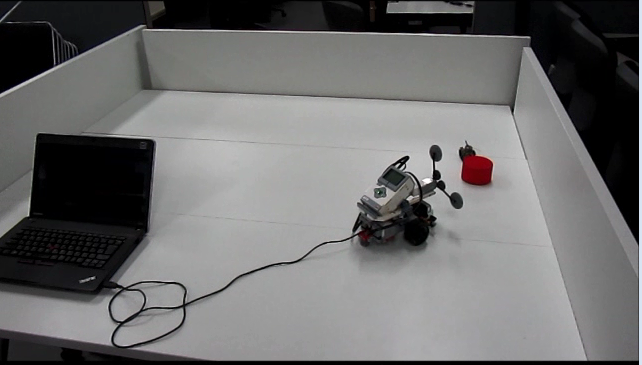
走行ロボットの前方にWebカメラを1つ取り付け,カメラから得られる情報をもとに目標物体を
自動追従する.
走行ロボットの前方にWebカメラを1つ取り付け,カメラから得られる情報をもとに目標物体を
自動追従する.
手順:
a. Webカメラを取り付けた走行ロボットを用意する.
b. 走行ロボットの電源をいれ,プログラムを動かす.
c. Webカメラからの情報をもとに目標物体を自動追従する.
a. Webカメラを取り付けた走行ロボットを用意する.
b. 走行ロボットの電源をいれ,プログラムを動かす.
c. Webカメラからの情報をもとに目標物体を自動追従する.
内容2:
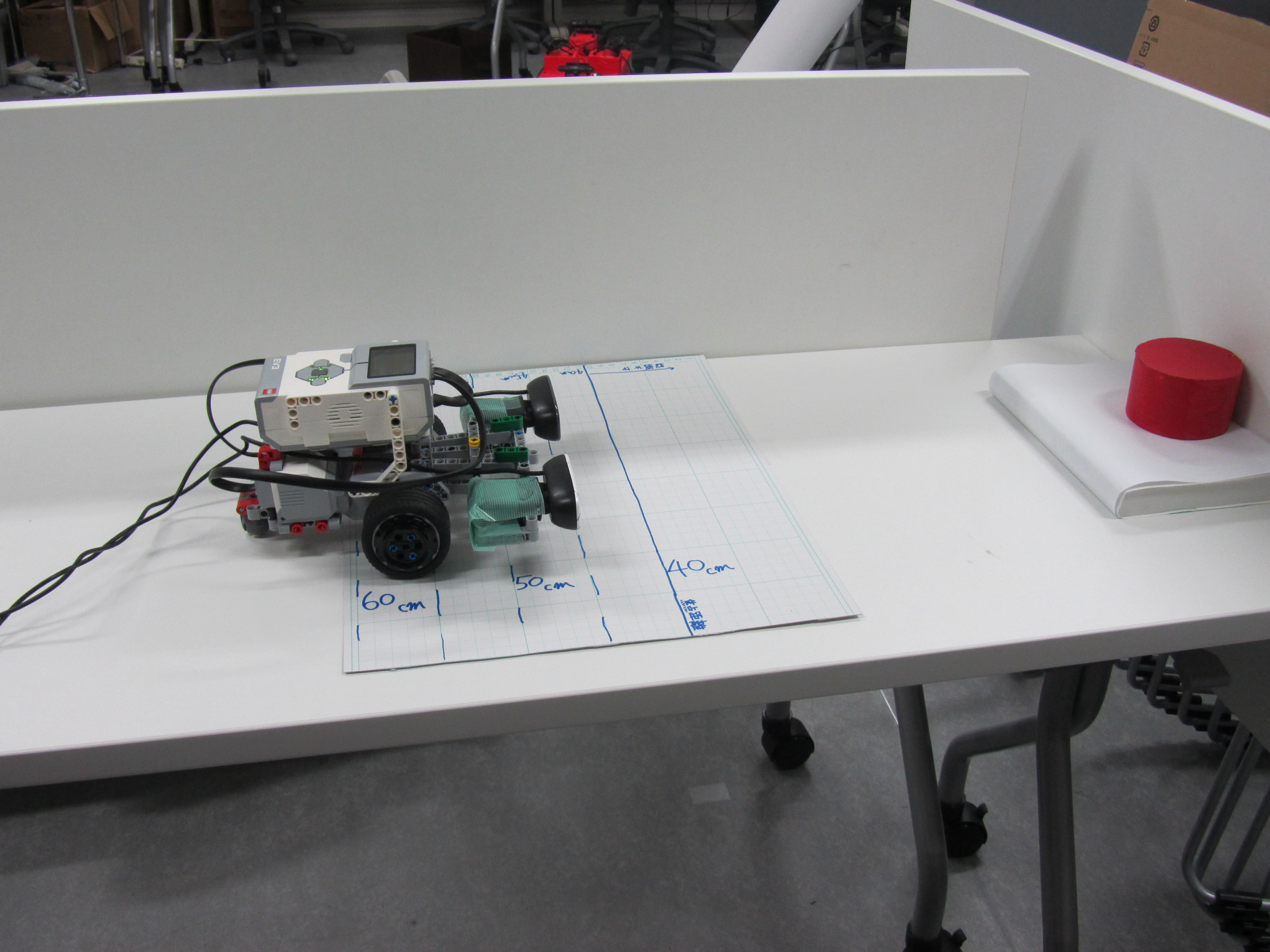
2つのWebカメラを用いて,ステレオ視で距離を計測する.その距離を使用し,目標距離で停止する.
手順:
a.2つのWebカメラを取り付けた走行ロボットを用意する.
b.走行ロボットの電源をいれ,停止させたい目標距離を入力し,プログラムを動かす.
c.自動で目標物体を探索し,発見後,目標距離まで近づき,停止する.
デモ動画
感想
このデモコンを通して,これまで触れたことがなかったC#言語やOpenCvSharpといった技術の基礎を学ぶことができ,また,先輩や友人に相談することの大切さを知った.
ここで身につけた技術や問題解決能力を活かし,かつ発展させながら,
これから始まる卒業研究に全力で取り組んでいきたいと思った.
ここで身につけた技術や問題解決能力を活かし,かつ発展させながら,
これから始まる卒業研究に全力で取り組んでいきたいと思った.