YOLOによる物体認識を用いた全自動お片付けロボットの開発(神谷)
デモの目標
完全に全自動のお片づけロボットを製作する.
デモの内容
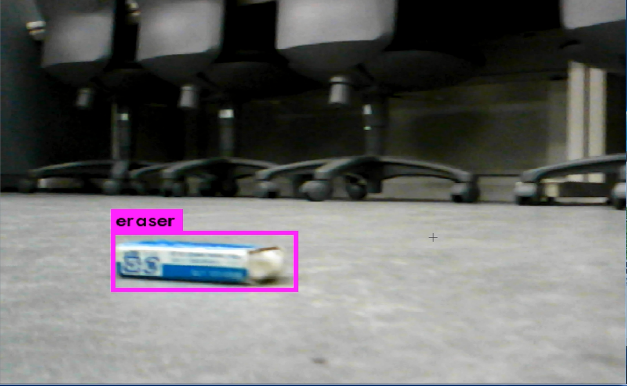
1. ロボットが YOLO による認識により対象物を探す.
2. ロボットが対象物に接近する.
3. ロボットが対象物をはさむ.
4. ロボットが対象物を目的地まで運ぶ.
5. ロボットが対象物をはなす.
2. ロボットが対象物に接近する.
3. ロボットが対象物をはさむ.
4. ロボットが対象物を目的地まで運ぶ.
5. ロボットが対象物をはなす.
デモ動画
感想
自分に力がついたことを実感した.
開発環境が大変だったが,その分完成したときの喜びも大きかった.
開発環境が大変だったが,その分完成したときの喜びも大きかった.