モーションキャプチャを用いた動作軌跡の認識による3D物体造形システム(石山)
デモの目標
モーションキャプチャーを用いて,3D物体を造形するシステムを開発する.
デモの内容
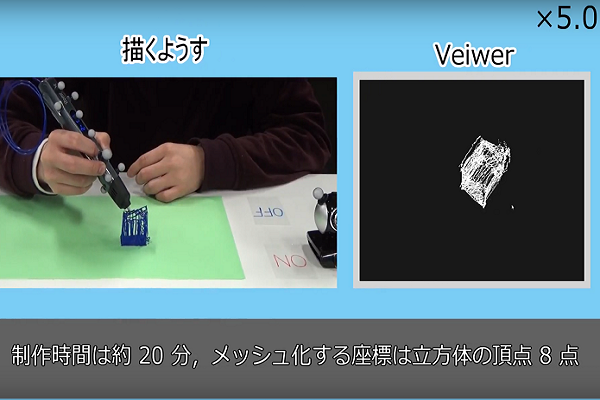
1.モーションキャプチャーを用いて3Dペンに装着したマーカーの座標データを取得する.
2.取得した座標データからPCLを用いてメッシュデータを作成する.
3.メッシュデータを用いて3Dプリンタで出力する.
2.取得した座標データからPCLを用いてメッシュデータを作成する.
3.メッシュデータを用いて3Dプリンタで出力する.
デモ動画
感想
初めて最初から最後までデモを動かすできてとてもいい経験をすることができた.
この経験を生かして,研究に向けて頑張りたいと思う.