新型 Mindstorm(EV3)を用いた自動走行(飯塚)
デモの目標
1.EV3 に設置されたカメラの撮影画像を処理することにより,2コースの自動走行を実装する.
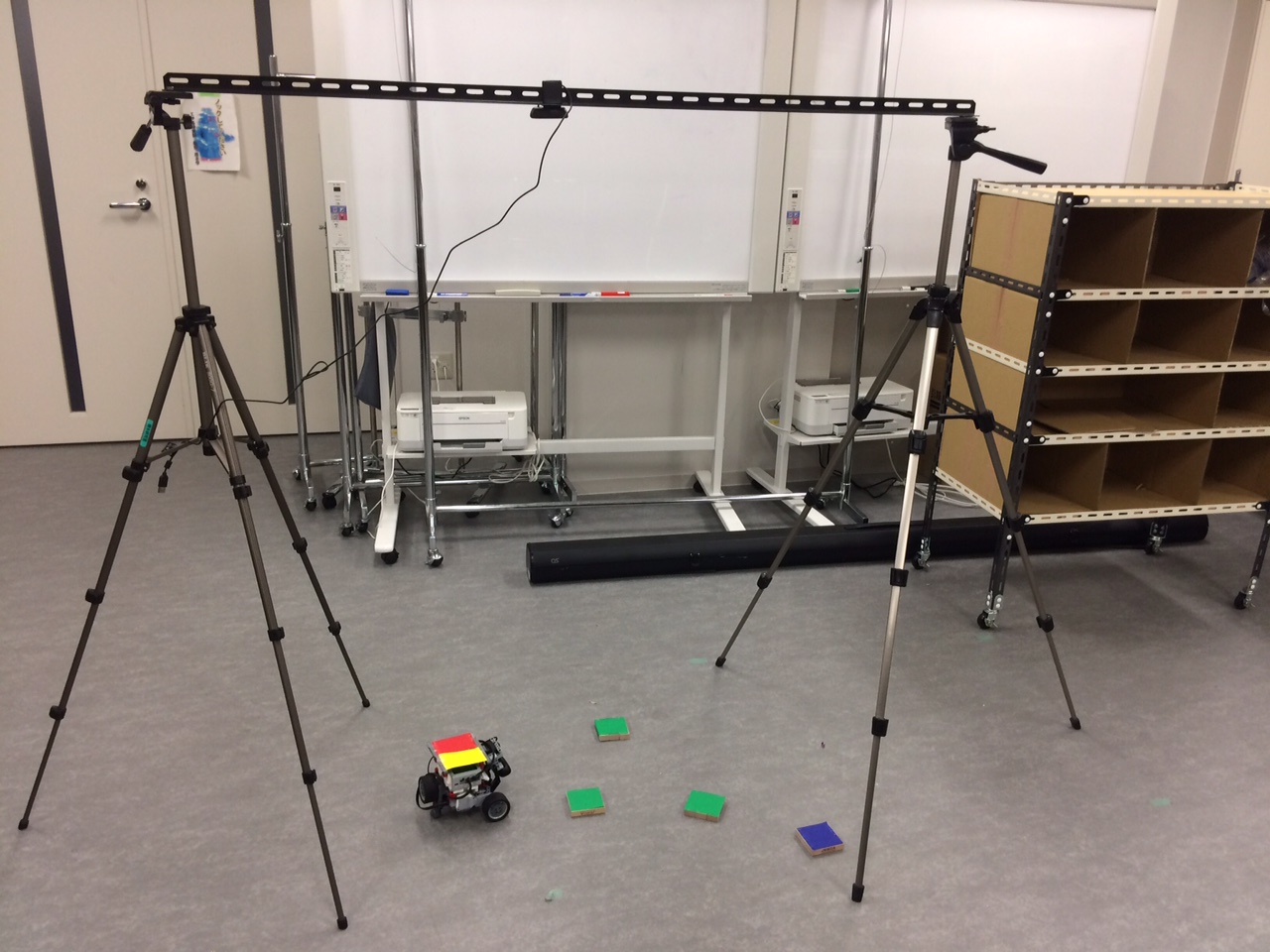
2.頭上カメラの撮影画像を処理することにより,障害物を回避する自動制御を実装する.
2.頭上カメラの撮影画像を処理することにより,障害物を回避する自動制御を実装する.
デモの内容
1-1.線を追従する.
1-2.ノイズを処理する.
1-3.矢印を認識する.
1-4.色判断から分かれ道の選択をおこなう.
1-5.1-1~1-4を繰り返す.
1-2.ノイズを処理する.
1-3.矢印を認識する.
1-4.色判断から分かれ道の選択をおこなう.
1-5.1-1~1-4を繰り返す.
2-1.EV3,障害物,ゴールを認識する.
2-2.障害物があれば障害物を回避する.
2-3.障害物がなければゴールへ向かう.
2-4.2-1~2-3を繰り返す.
デモ動画
感想
1つのアイディアだけではうまくいかず,
さまざまな観点のアイディアがあって一つの作品が生まれるのだと知ることができた.
C# や OpenCVSharp の知識を得ることができた.
さまざまな観点のアイディアがあって一つの作品が生まれるのだと知ることができた.
C# や OpenCVSharp の知識を得ることができた.