メガローバー制御による自動走行(濵嶌)
デモの目標
[1]メガローバーを制御し,Webカメラを用いて指定した色を追尾する.
[2]kinectを用いて障害物を避けて走行する.
[2]kinectを用いて障害物を避けて走行する.
デモの内容
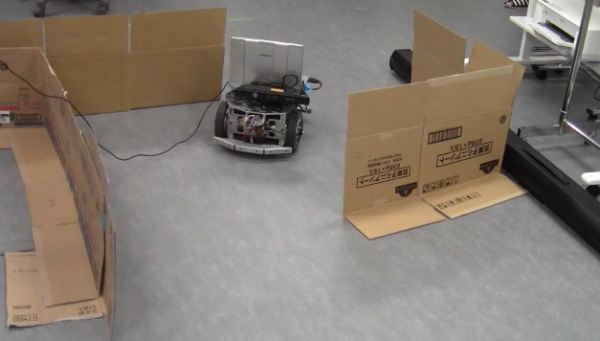
1.メガローバーとkinect,障害物を用意する.
2.OpenCVによる画像処理プログラムとメガローバーを起動する.
3.メガローバーが直進する方向に障害物があると,避けて走行する.
4.直進する方向に障害物がなければそのまま直進する.
5.3~4を繰り返す.
2.OpenCVによる画像処理プログラムとメガローバーを起動する.
3.メガローバーが直進する方向に障害物があると,避けて走行する.
4.直進する方向に障害物がなければそのまま直進する.
5.3~4を繰り返す.
デモ動画
感想
このデモコンを通して,OpenCVの知識やプログラミング力を得ることができた.
当初の計画通りには全く進まず,苦労をしたが最後までやり切る力を身に付けることが出来た.
開発スケジュールを計画することがとても重要だとわかった.
この経験を卒研などに活かしていきたいと思う.
当初の計画通りには全く進まず,苦労をしたが最後までやり切る力を身に付けることが出来た.
開発スケジュールを計画することがとても重要だとわかった.
この経験を卒研などに活かしていきたいと思う.