小型ロボットLEGO-Mindstormを用いた全自動すごろくシステム(藤田)
デモの目標
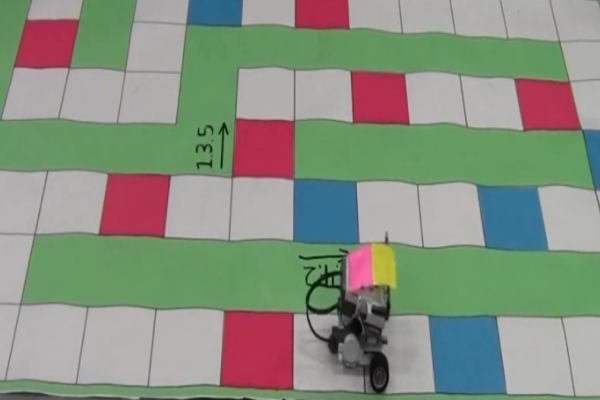
自動制御ロボット(NXT)を用いて自動ですごろくをする.
デモの内容
1. 天井に取り付けたカメラからNXTの現在位置を把握する.
2. 天井カメラとは別のサイコロ認識用のカメラからサイコロの出た目を認識し,NXTに信号を送信する.
3. マス座標をたよりにNXTを自動制御する.
4. NXTがサイコロで出た目の数だけマスを移動する.
5. 1~4をゴールまで繰り返す.
2. 天井カメラとは別のサイコロ認識用のカメラからサイコロの出た目を認識し,NXTに信号を送信する.
3. マス座標をたよりにNXTを自動制御する.
4. NXTがサイコロで出た目の数だけマスを移動する.
5. 1~4をゴールまで繰り返す.
デモ動画
感想
デモコンを通じて実際にプログラムを書いて動かすことの楽しさや難しさを感じました.
また,計画を立てることの重要性や計画通りに進める難しさを知るよい機会でした.
また,計画を立てることの重要性や計画通りに進める難しさを知るよい機会でした.