LEGO Mindstormsによるアームロボットの開発と制御(有賀)
デモの目標
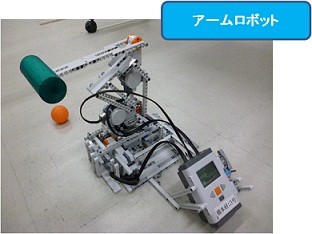
LEGO Mindstormsで自作のアームロボットを作り,PCからの外部制御で簡単なゴルフをさせる!!
デモの内容
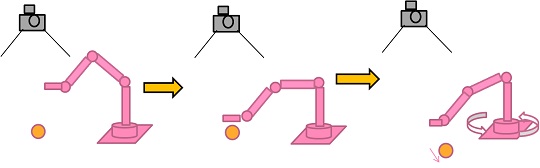
1.アームロボットとカップを設置し,上からwebカメラで背景画像を撮影する.
2.ボールを置き,再度撮影し背景差分によりボールの位置を検出する.
3.ボールの位置から,モーターを動かす角度を計算.
4.Bluetoothを使いアームロボットに角度データを送る
5.受け取った角度データによりアームロボットを動かしボールを打つ.
2.ボールを置き,再度撮影し背景差分によりボールの位置を検出する.
3.ボールの位置から,モーターを動かす角度を計算.
4.Bluetoothを使いアームロボットに角度データを送る
5.受け取った角度データによりアームロボットを動かしボールを打つ.
デモ動画
感想
最初のうちはなかなか思うように進まず苦労したが,その分完成した時の達成感は大きかったと思う.
アームロボットの設計など楽しみながらできたのでよかった.
この経験を卒研などに活かしていきたいと思う.
アームロボットの設計など楽しみながらできたのでよかった.
この経験を卒研などに活かしていきたいと思う.