B. Drost,M. Ulrich,N. Navab and S. Ilic:“Model globally, match locally: Efficient and robust 3D object recognition”,IEEE Computer Vision and Pattern Recognition (CVPR), pp.998-1005, 2010.
概要
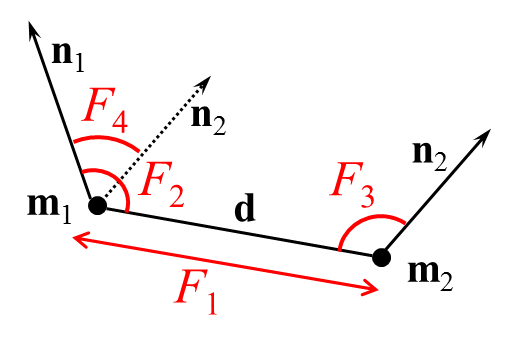
この手法は,Point Pair Feature(PPF)と呼ばれる法線方向を持った2点対で構成される特徴量を使った3次元位置姿勢認識手法です.
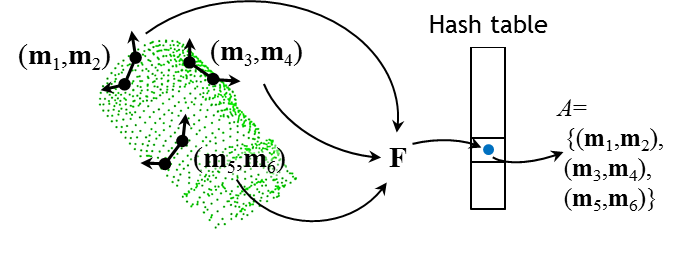
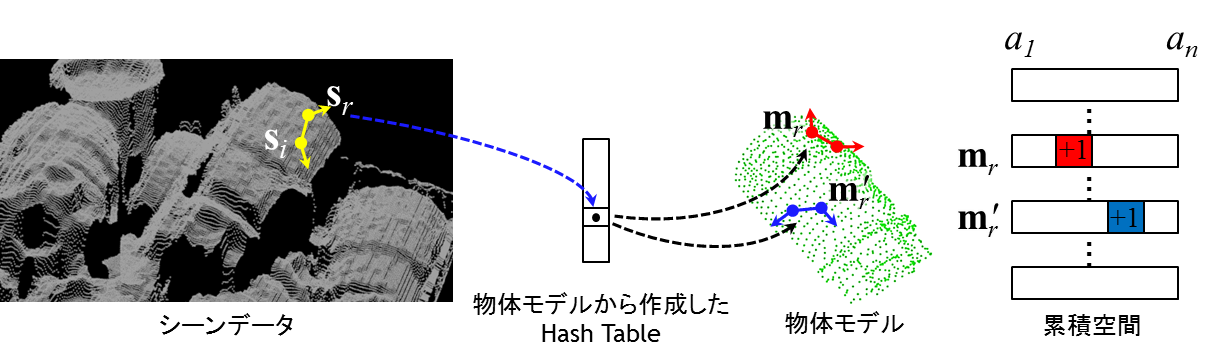
Global Model DescriptionとVoting Schemeの大きく分けて2つのモジュールによって構成されています.
Global Model Descriptionでは物体モデルからPPFを作成し,Hash Tableに登録します.
Voting Schemeでは投票処理によって物体の位置姿勢を認識します.