セマンティックセグメンテーションのための教師データを低コストな手順で大量に生成する手法を提案しました.
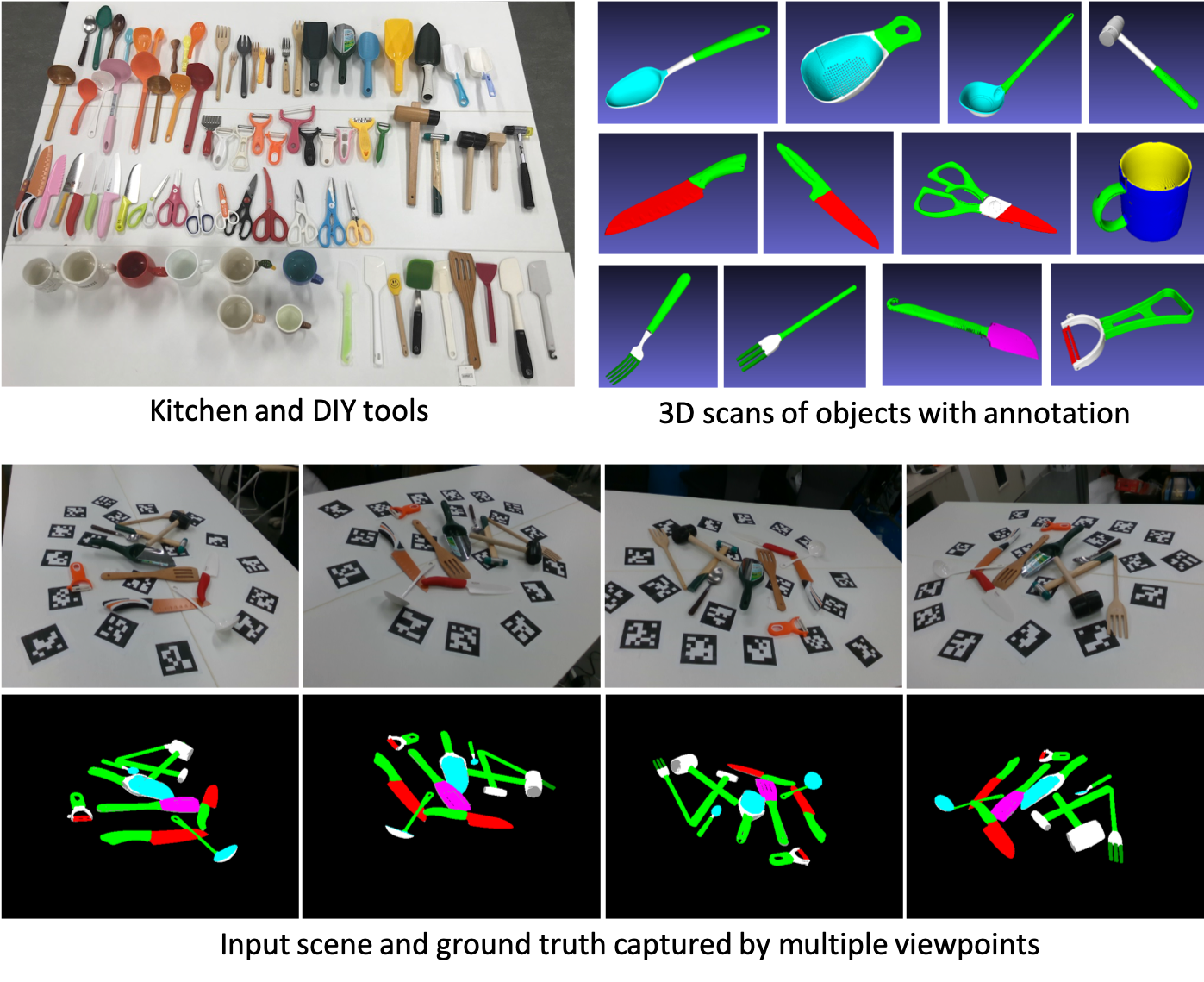
提案手法では,RGBDセンサによって取得した画像中の物体の位置姿勢を推定し,あらかじめ3Dモデルに割り当てておいたラベル情報を画像に投影します.さらに,RGBDセンサを移動させながら画像を撮影し,視点の相対移動量を元にラベル情報を他の画像へ投影することによって画素単位の教師データを得ます.
この手法により,半自動的に実画像とGround truthのペアを大量に得ることが可能となりました.10250セットのRGB画像・点群・Ground truthで構成される,機能属性推定のための新たなデータセットであるNEDO Part-Affordance Dataset v1を作成しました.
1.Shuichi Akizuki and Manabu Hashimoto, Semi-automatic training data generation for semantic segmentation using 6DoF pose estimation, 14th International Conference on Computer Vision Theory and Applications (VISAPP) 2019.
Copyright(C)2010 – Hashimoto Lab., All rights reserved