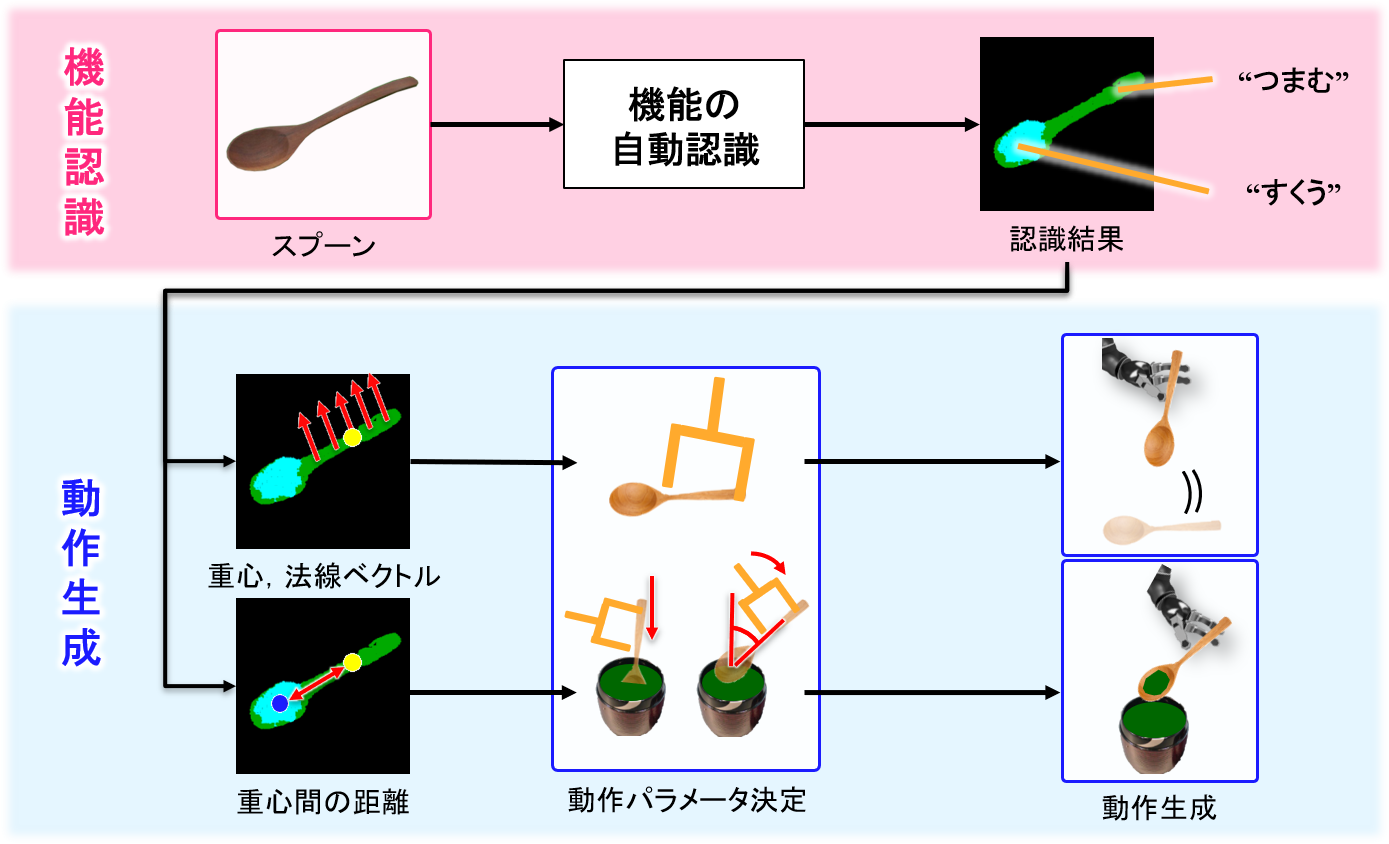
スプーンを用いた「ものをすくって容器に入れる」というタスクにおいて,スプーンに備わる機能の認識結果を用い,ロボット動作生成のための動作パラメータを部分的に決定する手法を提案しました.提案手法では,スプーンに備わる“つまむ”,“すくう”という機能を有する領域を認識し,それぞれの領域の重心と重心間の距離,“つまむ”機能を有する領域の法線ベクトルを算出します.そして,これらを用いて,ロボットの動作パラメータ(アプローチ位置,方向)を部分的に決定します.決定した動作パラメータに基づき,スプーンの把持動作や,ものをすくう動作を生成します.本技術は,生活支援ロボットなどに適用可能です.
1.寺沢拓真,飯塚正樹,橋本学,日用品の機能ラベル情報を利用したロボット動作の部分的生成 ,動的画像処理実利用化ワークショップ(DIA2019),IS2-19 pp.340-345,2019/03/08.
2.飯塚正樹,橋本学,日用品に備わる機能属性情報を用いたセマンティック把持,精密工学会IAIPサマーセミナー2018,pp.5-8,2018/8/22..
3.飯塚正樹,橋本学,機能情報を利用したセマンティック把持のための把持位置検出,平成30年度電気・電子・情報関係学会東海支部連合大会,I5-7,2018/9/4. .
Copyright(C)2010 – Hashimoto Lab., All rights reserved