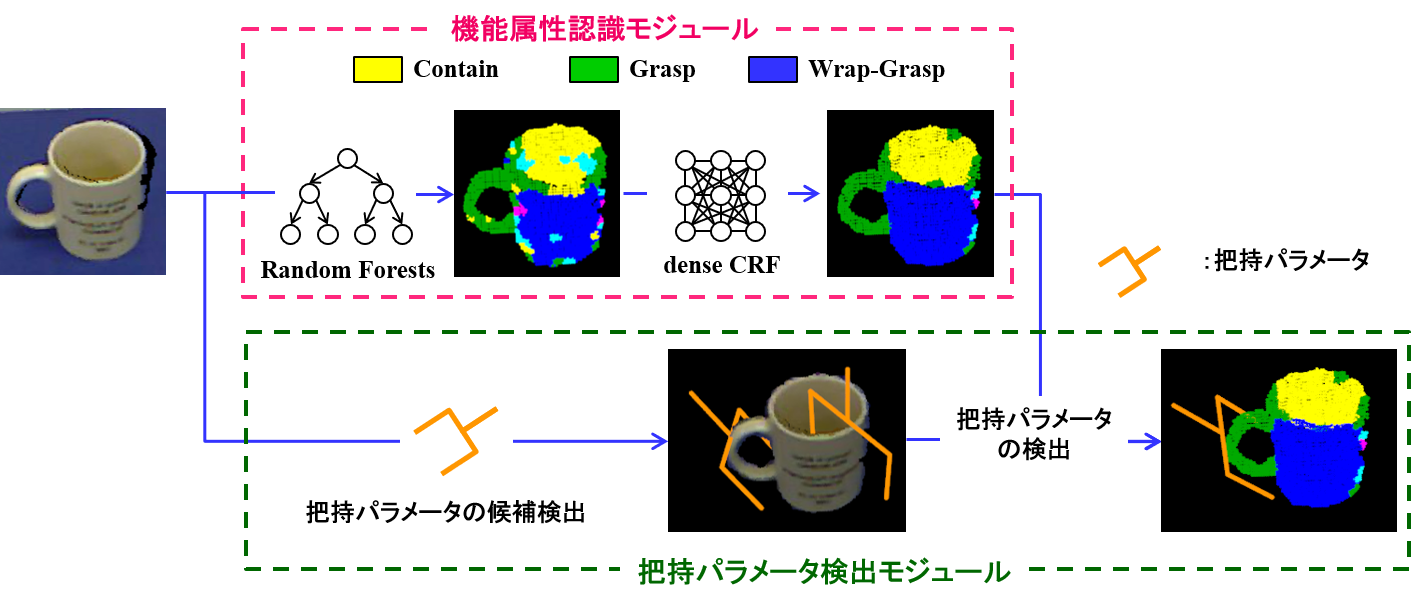
生活支援ロボットがスプーンなどの日用品を把持する際には,「スープをすくう」のような特定のタスクを実施することを考慮した把持(セマンティック把持)が求められます.本手法では,対象物に備わる機能属性を認識しこの結果をもとにタスク実行を阻害しない領域のみを抽出,さらにその領域内から把持パラメータ(把持位置,アプローチ方向,ハンドの開口幅)を検出する手法を提案しました.機能属性認識によって,本来把持すべきコップの“取っ手”領域と,コップの“飲み口”の領域のように,把持できるが把持すべきでない領域を判別することができます.
1.Masaki Iizuka, Manabu Hashimoto, Detection of Semantic Grasping-Parameter using Part-Affordance Recognition, The 19th International Conference on Research and Education in Mechatronics (REM2018), pp.136-140, DOI:10.1109/REM.2018.8421780, 2018/6/8.
2.飯塚正樹,橋本学,日用品に備わる機能属性情報を用いたセマンティック把持,精密工学会IAIPサマーセミナー2018,pp.5-8,2018/8/22 優秀発表賞