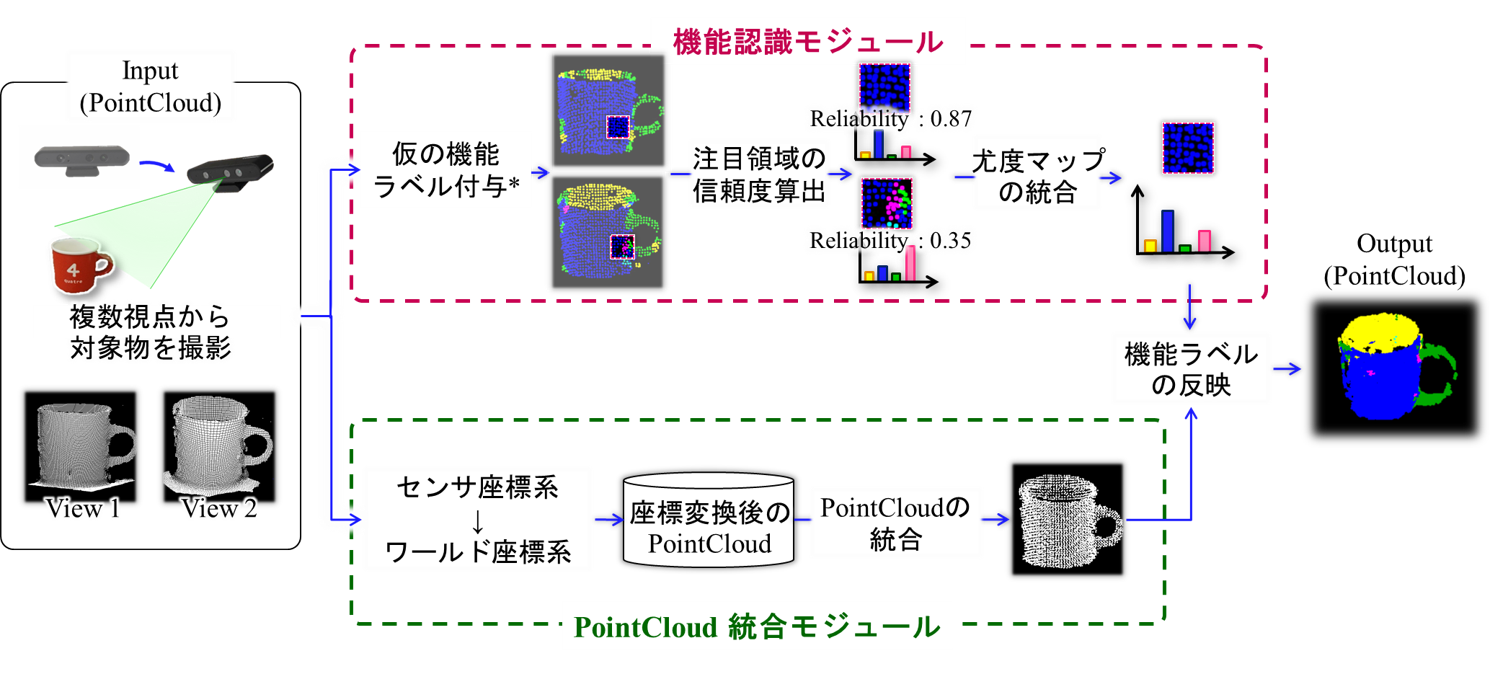
多視点データから日用品に備わる機能を高信頼に認識する手法を提案しました.生活支援ロボットは屋内を動き回ることが想定され,オクルージョンなどの要因から対象物を撮影する視点によって認識率が低下することが考えられます.このことから,提案手法では,各視点から撮影したデータに仮の機能ラベルを付与し,「注目領域とセンサとの正対性」と「注目領域と周辺領域との関係性」の2つの指標から仮ラベルの信頼度を評価します.この信頼度に基づいて多視点データを統合することによって,高信頼化を実現します.
1.城亮輔,飯塚正樹,橋本学,信頼度に基づき統合した多視点3Dデータによる日用品の機能属性認識,平成30年度電気・電子・情報関係学会東海支部連合大会,J5-6,2018/9/4.
2.城亮輔,飯塚正樹,橋本学,多視点3Dデータに基づく信頼度付き領域統合による機能属性認識の高精度化,動的画像処理実利用化ワークショップ(DIA2018),IS1-26,pp.182-187,2018/03/08.研究奨励賞受賞
Copyright(C)2010 – Hashimoto Lab., All rights reserved