物体検出用シーン(2D)データセット
デモシステム開発 お茶会ロボットシステム(CEATEC JAPAN 2018)で使用した,アイテムのカテゴリ名とバウンディングボックス(BB)が付与されたRGB画像データベース(DB)を公開しました.
本DBは,お茶を点てる際に必要な柄杓や茶釜などのアイテムが配置されているシーンのRGB画像と,各アイテムのカテゴリ名とこれらを囲うバウンディングボックスの位置を記載したテキストデータからなっています.CEATEC JAPAN 2018では,本研究室が開発した主要技術やc. 機能属性セグメンテーション用シーン(2D)データセットと組み合わせてこのデータを利用することによって,自律的にタスクを生成するお茶会ロボットシステムを開発しました.本データセットはPascalVOC[1]データセットおよびYOLO[2]データセットのデータ形式をもとに作成されています.デモの詳細はデモシステム開発 お茶会ロボットシステム(CEATEC JAPAN 2018)にて紹介されています.

データセットの概要
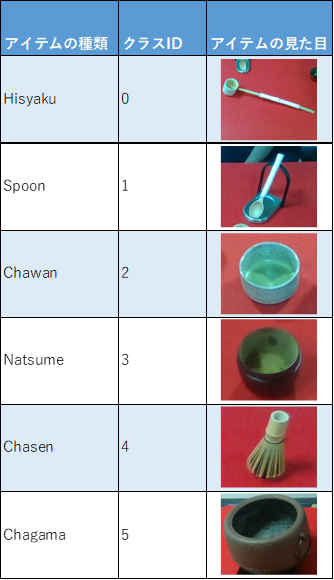
シーン内のアイテムの種類は,形状由来の機能が付与される6種類のカテゴリを想定し,これらをさまざまな配置で撮影したデータを用意しました.データ形式は以下のようになっています.
- 物体カテゴリ:6種類Chagama, Chasen, Chawan, Hisyaku, Natsume, Spoon
シーン画像枚数:15680枚
データセットの構成
本データセットは,お茶を点てるためのアイテムが配置されたシーンのRGB画像とPascalVOC形式のXMLデータ,YOLO形式のTXTデータを用意しています.
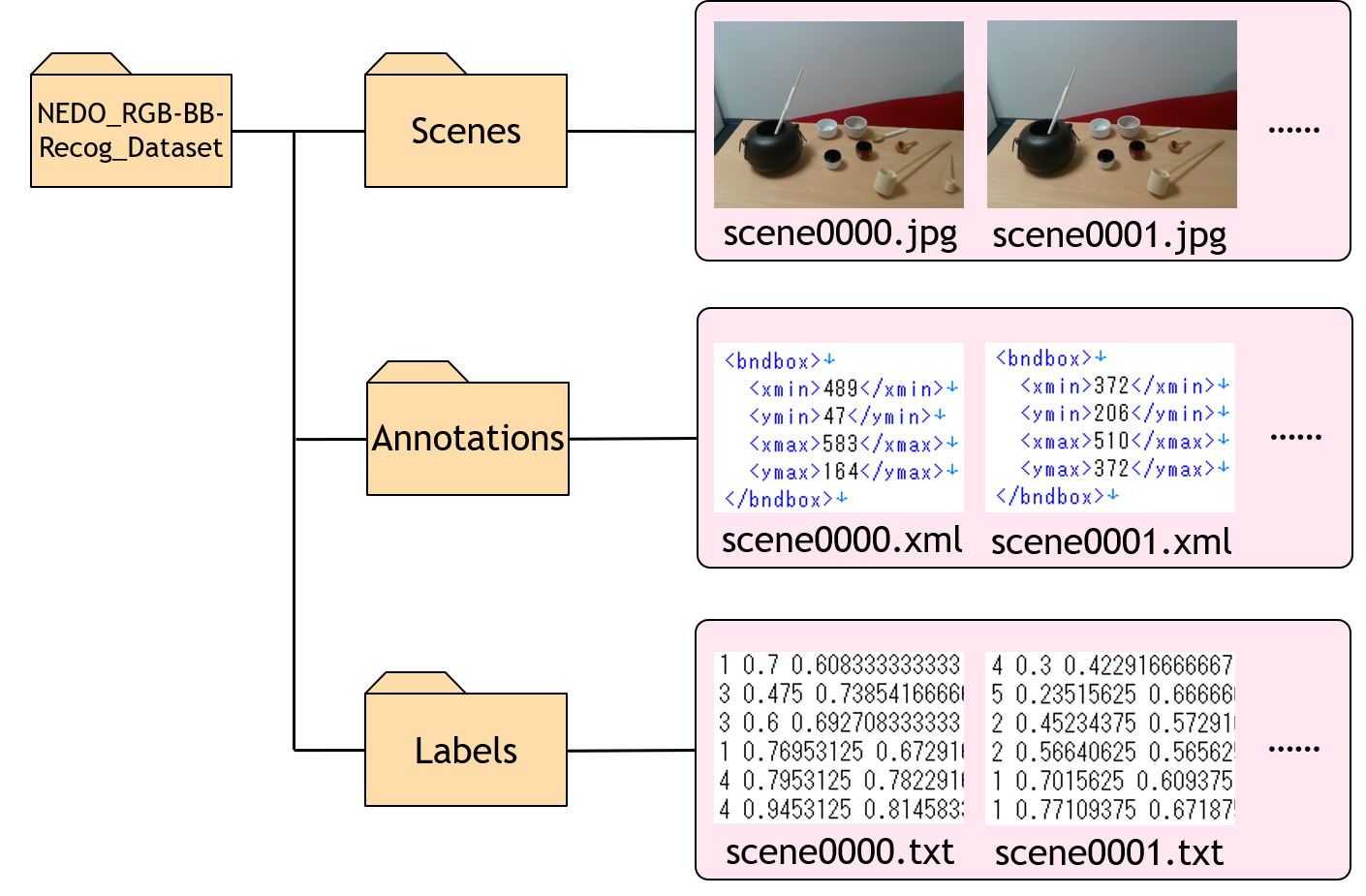
各データの形式
- シーン画像
- JPG形式:scene”通し番号”.jpg :gm*_scene”通し番号”.jpg
:a(“通し番号”).jpg
例:通し番号 1 ”scene0001.jpg” , “gm15_scene0001.jpg”, “a(1).jpg”
- JPG形式:scene”通し番号”.jpg :gm*_scene”通し番号”.jpg
- アノテーションデータ シーン画像とアノテーションデータは通し番号で対応しており,カテゴリ名とBBの位置・大きさが付与されています.
- PascalVOC XML形式:scene”通し番号”.xml :gm*_scene”通し番号”.xml
:a(“通し番号”).xml 例:通し番号 1 ”scene0001.xml”, “gm15_scene0001.xml”, “a(1).xml”

.xmlの例
- YOLO TXT形式:scene”通し番号”.txt :gm*_scene”通し番号”.txt
:a(“通し番号”).txt 例:通し番号 1 ”scene0001.txt”, “gm15_scene0001.txt”, “a(1).txt” ※クラスID BB中心のx座標 BB中心のy座標 BBの幅 BBの高さ
(座標,幅,高さは0~1で正規化されています.)

.txtの例
- PascalVOC XML形式:scene”通し番号”.xml :gm*_scene”通し番号”.xml
[1] http://host.robots.ox.ac.uk/pascal/VOC/
Download
Copyright(C)2010 – Hashimoto Lab., All rights reserved