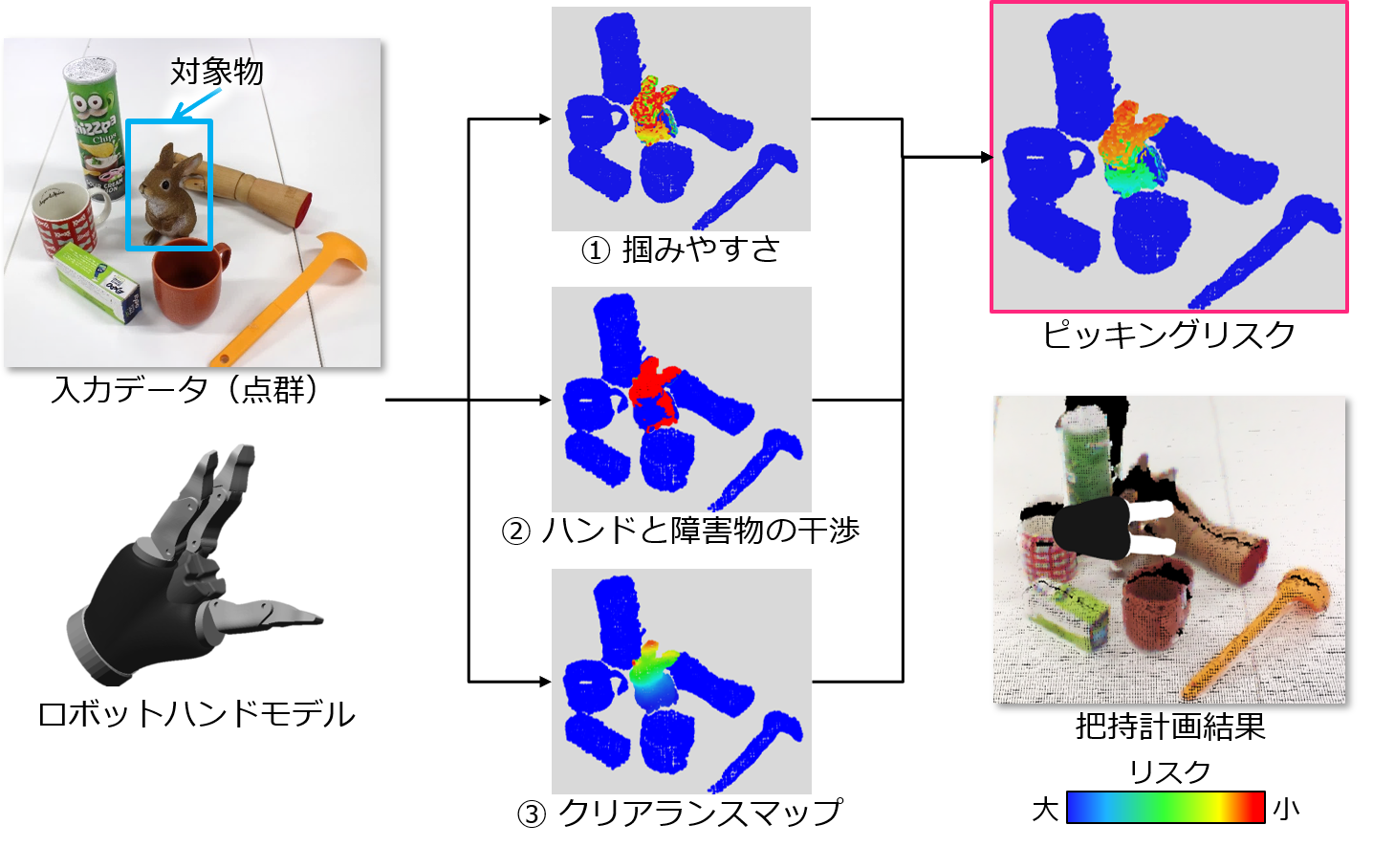
複数の物体が密に存在する環境においても,ロボットハンドが障害物と干渉せず対象物を掴むことができる把持パラメータを決定する手法を開発しました.本研究では,対象物とロボットハンドから推定される把持の容易性に加え,非対象物,すなわち障害物の空間的な位置関係に着目して把持パラメータ(アプローチ位置,姿勢,開口幅)を決定します.これら3種の相互関係を確率モデルで表現することにより,把持が失敗してしまうリスク(ピッキングリスク)を把持位置の関数として定式化します.この関数を最小化することにより,干渉状態が発生しにくくかつ掴みやすい把持パラメータを自動的に決定することができます.実験により,オクルージョンが発生している環境での把持成功率82%,1物体当りの処理時間0.42秒を実現しました.本技術は,生活支援ロボットや物流ロボット,生産システムなどに用いるビジョンシステムに適用可能です.
1.Kentaro Kozai, Manabu Hashimoto, Determining Robot Grasping-Parameters by Estimating “Picking Risk”, International Workshop on Advanced Image Technology 2018 (IWAIT2018), A3-96, 2018/1/10. Best Paper Award受賞
2.香西健太郎, 橋本学, ピッキング時の空間的余裕を考慮した複雑な環境下における対象物把持パラメータの決定手法 , 第18回計測自動制御学会システムインテグレーション部門講演会(SI2017), 3A4-03, pp. 2149-2154, 2017/12/22.
Copyright(C)2010 – Hashimoto Lab., All rights reserved