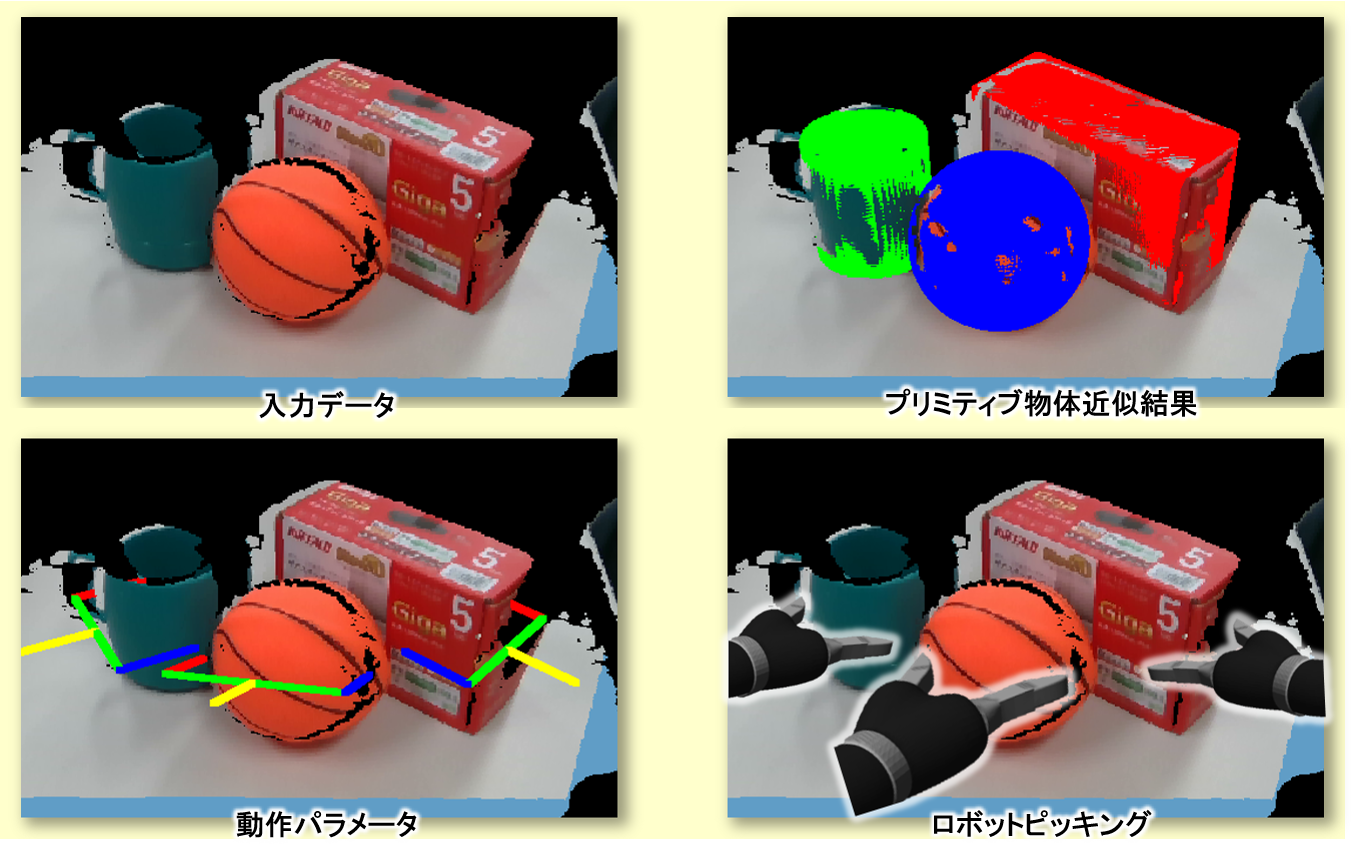
複数の物体が存在するシーンにおいても,対象物をプリミティブ物体近似し,ロボットの動作パラメータを決定する手法を開発しました.
本研究では,対象物を構成する面情報に着目し,仮説検証を用いてシーン中に存在する面領域を組み合わせることにより,対象物をプリミティブ形状で近似します.そして,近似結果と把持ルールを用いて,ロボットの動作パラメータ(アプローチ位置,方向,角度,開口幅)を決定します.仮説検証を用いて最適な対象物の領域を認識するため,前処理にセマンティックセグメンテーション(対象物の領域抽出)を必要としない手法を実現しました.
本技術は,物流ロボットや生産システムで使用されるビジョンシステムに応用できます.
1.鳥居拓耶, 橋本学, “モデルレス把持パラメータ決定のための3次元プリミティブ近似手法”, 計測自動制御学会論文集(第55巻第1号(2019年1月・SI特集号:「第18回 計測自動制御学会 システムインテグレーション部門講演会 特集号」)),Vol.55,No.1,pp.35-41,2019.
2.Takuya Torii, Manabu Hashimoto, Model-less Estimation Method for Robot Grasping Parameters Using 3D Shape Primitive Approximation, IEEE International Conference on Automation Science and Engineering 2018 (CASE2018), pp.580-585, 2018/8/22.
Copyright(C)2010 – Hashimoto Lab., All rights reserved