ROSを用いたロボット制御による積み木の自動組み立てシステム(寺沢)
デモの目標
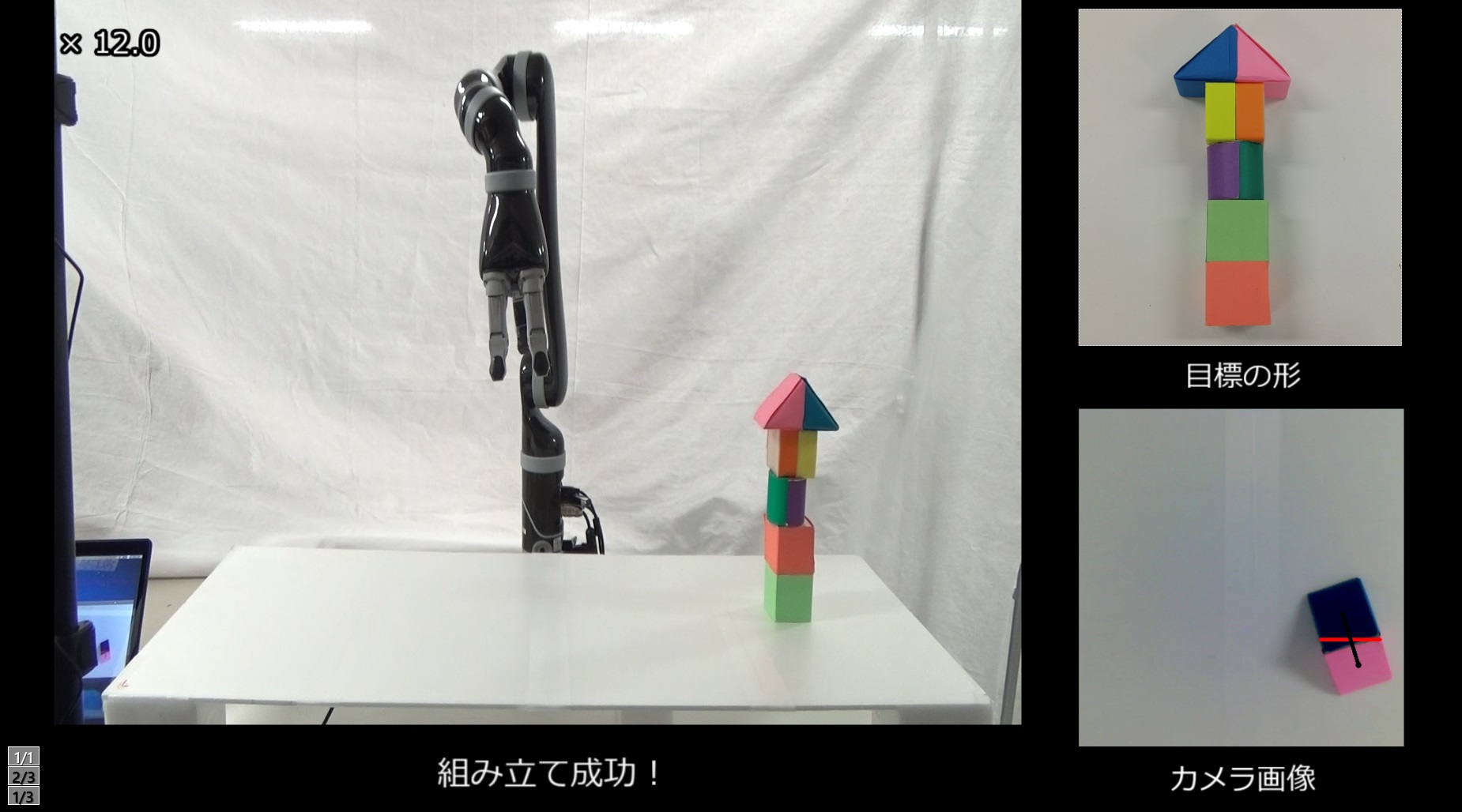
ROSを用いて,ロボットアームを制御し,積み木を自動で組み立てる.
デモの内容
1.4種類の積み木が組み立てられた画像をプログラムへ入力する.
2 カメラを用いて,積み木を上から見た画像を取得する.
2 カメラを用いて,積み木を上から見た画像を取得する.
3. 組み立てに必要な積み木の種類と位置姿勢を推定する.
4. 3.で推定した情報をもとに,ロボットが積み木を組み立てる.
5. 2.~4.を繰り返す.
デモ動画
感想
デモコンを通して,ROSの知識を得ることができた.
ロボット制御のプログラムを作成するという経験ができ,自分に力がついたことを実感できた.
ロボット制御のプログラムを作成するという経験ができ,自分に力がついたことを実感できた.