ターンテーブル制御とKinectを用いた3D対象物の全周囲スキャナ(田畑)
デモの目標
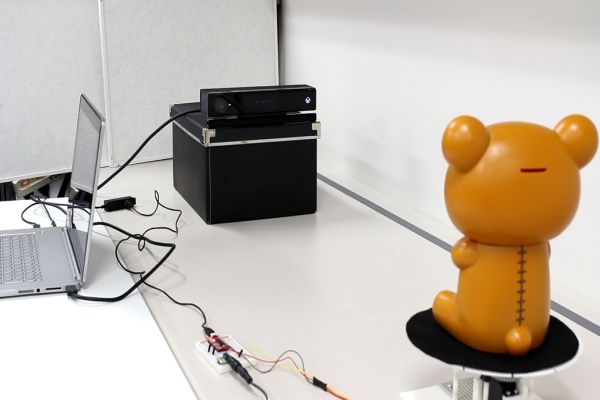
自動制御されたターンテーブル上の物体に対してKinectで取得した多視点の3Dデータをもとに全周囲モデルを生成するシステムの制作
デモの内容
1. PC からの制御によりターンテーブルを回転
2. 3 次元カメラから点群データを自動取得
3. 点群データから全周囲モデルを生成
4. 3D プリンタにより出力
2. 3 次元カメラから点群データを自動取得
3. 点群データから全周囲モデルを生成
4. 3D プリンタにより出力
デモ動画
感想
1 つのテーマに対して,決められた期間で取り組む経験は貴重なものでした.
実際に自分が書いたプログラムで 3D モデルが完成した時はとても達成感がありました.
実際に自分が書いたプログラムで 3D モデルが完成した時はとても達成感がありました.