LEGO Mindstormによる人の顔の自動追尾(杉山)
デモの目標
LEGO Mindstormのロボットに搭載したカメラで認識した画像を処理し,人の顔を自動追尾させ,そちらに向かって自動的に走行する全自動デモを開発する.
デモの内容
<開発したシステムの構成>
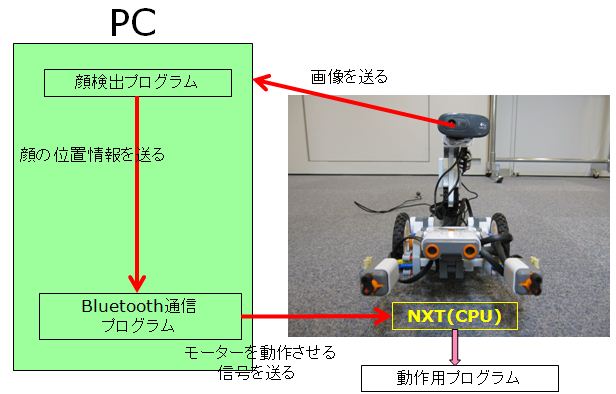
LEGO Mindstormで人の顔を追尾するためのロボットを開発した.
顔を検出する際には,OpenCVの顔検出プログラムを利用した.
外部接続を実現させるため,Bluetooth通信プログラムを作成した.
Bluetooth通信して飛ばした値をモータに伝達するロボットの動作用プログラムを作成した.上記の3つのプログラムを上の図のように組み合わせることで,人の顔を自動追尾するシステムが成立した.
(NXTとはLEGO MindstormのCPUのことである.)
デモ動画
LEGO Mindstorm二足歩行型ロボット
【動画1】
LEGO Mindstormサソリ型ロボット
【動画2】
LEGO Mindstormによる人の顔の自動追尾
【動画3】
LEGO Mindstormによる人の顔の自動追尾においての距離センサによる障害物自動回避
【動画4】
LEGO Mindstormによる人の顔の自動追尾においてのタッチセンサによる障害物自動回避
【動画5】
【動画1】
LEGO Mindstormサソリ型ロボット
【動画2】
LEGO Mindstormによる人の顔の自動追尾
【動画3】
LEGO Mindstormによる人の顔の自動追尾においての距離センサによる障害物自動回避
【動画4】
LEGO Mindstormによる人の顔の自動追尾においてのタッチセンサによる障害物自動回避
【動画5】
感想
これまでの私の人生の中で,これほど没頭して何かをするということはありませんでした.
今回のデモコンへの応募を通じて,実際に動作するモノを開発するということがどれだけ難しいことなのか,それだけに完成したときの喜びがどんなに大きいかを実感しました.
この苦労した経験は,今後の人生に必ず良い影響を与えると確信しました.
今回のデモコンへの応募を通じて,実際に動作するモノを開発するということがどれだけ難しいことなのか,それだけに完成したときの喜びがどんなに大きいかを実感しました.
この苦労した経験は,今後の人生に必ず良い影響を与えると確信しました.