LeapMotionを用いたじゃんけんロボットの開発(森)
デモの目標
1.Leap Motion を用いた遠隔操作ロボットハンドの開発
2.じゃんけんプログラムの実装
2.じゃんけんプログラムの実装
デモの内容
1.Leap Motion を用いて,人の手の形を検出する.
2.ハンドがじゃんけんでユーザーに勝つ形を出すようにモータに信号を出力する.
2.ハンドがじゃんけんでユーザーに勝つ形を出すようにモータに信号を出力する.
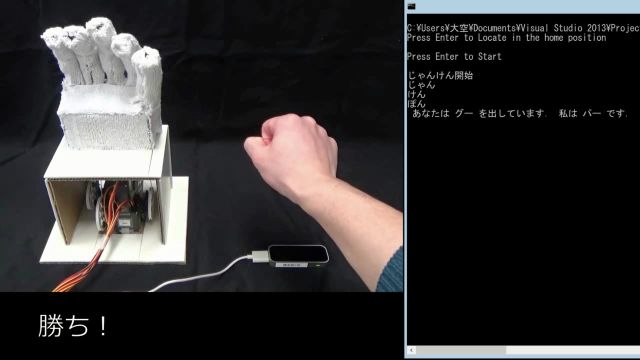
デモ動画
感想
計画通りに進まないことがあり焦ったときもあったが,先の予定を前倒しするなど時間の使い方を学べるいい機会となった.