Last updated: June 20, 2013.
【参考文献】
- B. Drost,M. Ulrich,N. Navab and S. Ilic:“Model globally, match locally: Efficient and robust 3D object recognition”,IEEE Computer Vision and Pattern Recognition (CVPR), pp.998-1005, 2010.
- 概要
この手法は,Point Pair Feature(PPF)と呼ばれる法線方向を持った2点対で構成される特徴量を使った3次元位置姿勢認識手法です. Global Model DescriptionとVoting Schemeの大きく分けて2つのモジュールによって構成されています. Global Model Descriptionでは物体モデルからPPFを作成し,Hash Tableに登録します. Voting Schemeでは投票処理によって物体の位置姿勢を認識します. - Point Pair Feature
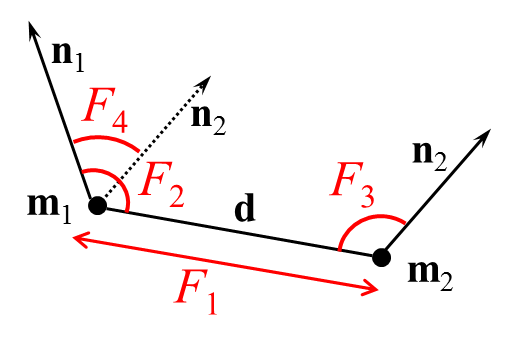
PPFは法線(n1,n2)を持った2点(m1,m2)で構成された 以下に示すような特徴量Fを持ちます.
- Global Model Description
このモジュールでは,物体モデルの全ての点対からPPFを作成し,Hash Table内に保存します. このとき,点間の距離と内積については量子化しておき,同一のプロパティを持つPPFを同じテーブルに登録することでグルーピングします. ハッシュキーはPPFの特徴ベクトルそのものであり,照合時にはシーンから抽出したPPFのプロパティをキーとして対応するテーブル内のPPFにアクセスします.
- PPFにおける位置姿勢の算出方法
PPFでは,姿勢仮説をPPF間の幾何変換パラメータの計算によって生成します. つまり,物体モデルの姿勢変換をPPF同士の変換が代表します. これによって,低コストに姿勢仮説を生成することができます. まず,モデル座標系で表されたPPFとシーン座標系で表されたPPFを変換パラメータTm→g,Ts→g によって基準点mr,srが原点,基準点に付随した法線がx軸に一致するように変換します. さらに,miをx軸周りにαだけ回転させ,siに一致させます. この一連の変換は以下の通りです.
まず,モデル座標系で表されたPPFとシーン座標系で表されたPPFを変換パラメータTm→g,Ts→g によって基準点mr,srが原点,基準点に付随した法線がx軸に一致するように変換します. さらに,miをx軸周りにαだけ回転させ,siに一致させます. この一連の変換は以下の通りです.

- Voting Scheme
PPFでは一般化ハフ変換のような投票型の認識手法を採っています. 投票の累積空間として2次元配列を用意します.行がモデル点mr,列が回転角αを表します.
まず,シーンデータから参照点srを選択し,それ以外のすべての点si とペアリングすることでPPFを作成します. 次にこのPPFのプロパティをハッシュキーとして対応するテーブルに登録されているPPFとの幾何変換パラメータを求めます. そして,累積空間において対応するmr,αの累積値を+1します. この操作をすべてのsiについて繰り返します. 最後に累積空間でのピークを見つけます. これにより,物体モデルはsrの位置でsrの法線方向まわりにα回転した場所に存在することが認識されます.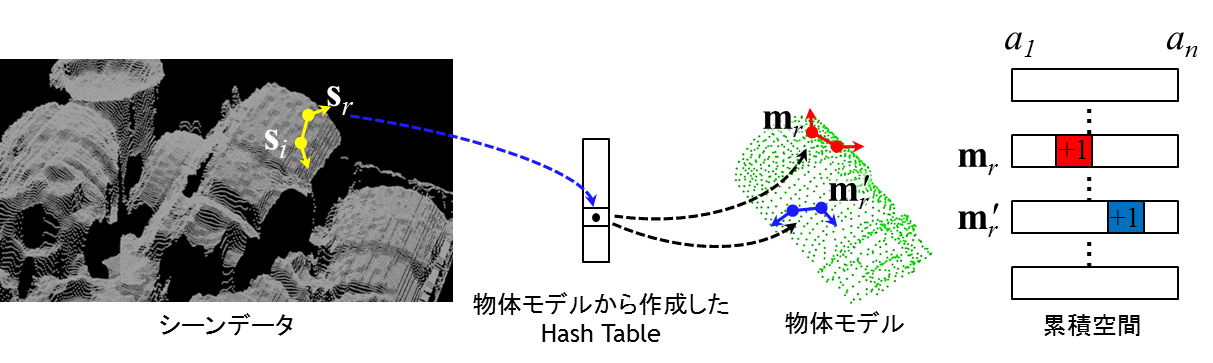
このページの制作: 橋本研究室(秋月秀一) Copyright 2013 ISL, Chukyo University