Last updated: Dec. 24, 2019.
【参考文献】
- 川瀬陽平,橋本学,組立作業における利き手・非利き手に着目した熟練度合い向上プロセスの視線と手の統合的分析,ビジョン技術の実利用ワークショップ(ViEW2019),IS2-B3,2019.
- Yohei Kawase, Manabu Hashimoto, Analysis of Skill Improvement Process Based on Movement of Gaze and Hand in Assembly Task, The 18th International Conference on Computer Analysis of Images and Patterns (CAIP2019), vol 11679. Springer, pp.15-26, DOI:10.1007/978-3-030-29891-3_2, 2019.
- 概要
組立作業では,作業者のスキルが生産性や製品の品質に大きな影響を与えるため,作業者をより早く熟練者に成長させる必要があります.その中で,作業者は,初級者から中級者,中級者から熟練者というように段階を踏んで成長します.そこで,作業者がより早く熟練者に成長するためには,初級者は初級者用,中級者は中級者用の教育内容というように,各スキルレベルで効果的な教育が求められます.そのためには,各スキルレベルにおいて,次のスキルレベルとの動きの違いを見つけることが重要になります.そこで,本研究では,作業者の視線と手の動きに着目して,各スキルレベルの動きの違いを評価する手法を提案します. - 熟練度合い向上プロセス分析の全体像
図1に提案手法の全体像を示します.はじめに,作業者の2次元で表現される視線と手の時系列の位置情報をセンシングします.視線の計測には,メガネ型視線計測装置(Tobii Pro Glasses2)を使用します.また,両手の計測には,モーションキャプチャシステムを使用して,両手の甲に装着した反射マーカーをセンシングします.次に,位置座標を量子化することによって,計測された視線と手の位置情報をコード列に変換します.最後に,視線と手のコード列を用いて,視線と手の動きの関係を表現する視線・動作統合特徴量を生成します.本研究では,この特徴量を用いて,スキルレベルごとの動きの違いを評価します.
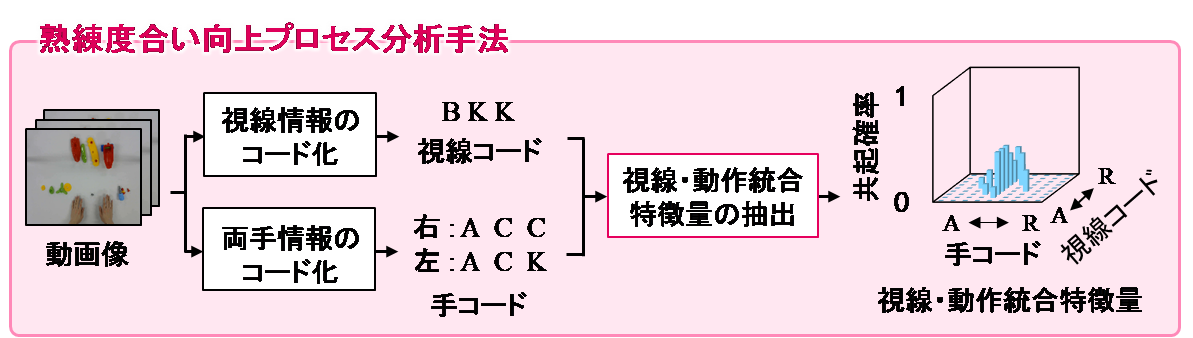 図1 熟練度合い向上プロセス分析の全体像
図1 熟練度合い向上プロセス分析の全体像
- 視線と手のコード列の生成
視線と手の位置情報のコード化の流れを図2に示します.図2に示されている作業台は,2次元座標系として表現されます.また,本研究では,利き手と非利き手では,習熟過程が異なると仮定し,利き手と非利き手を明確に区別します.コード化は,視線と手の座標を量子化し,それらの座標をコードとしてエンコードする.このエンコードを各フレームに施すことによって,視線と手のコード列が生成されます.
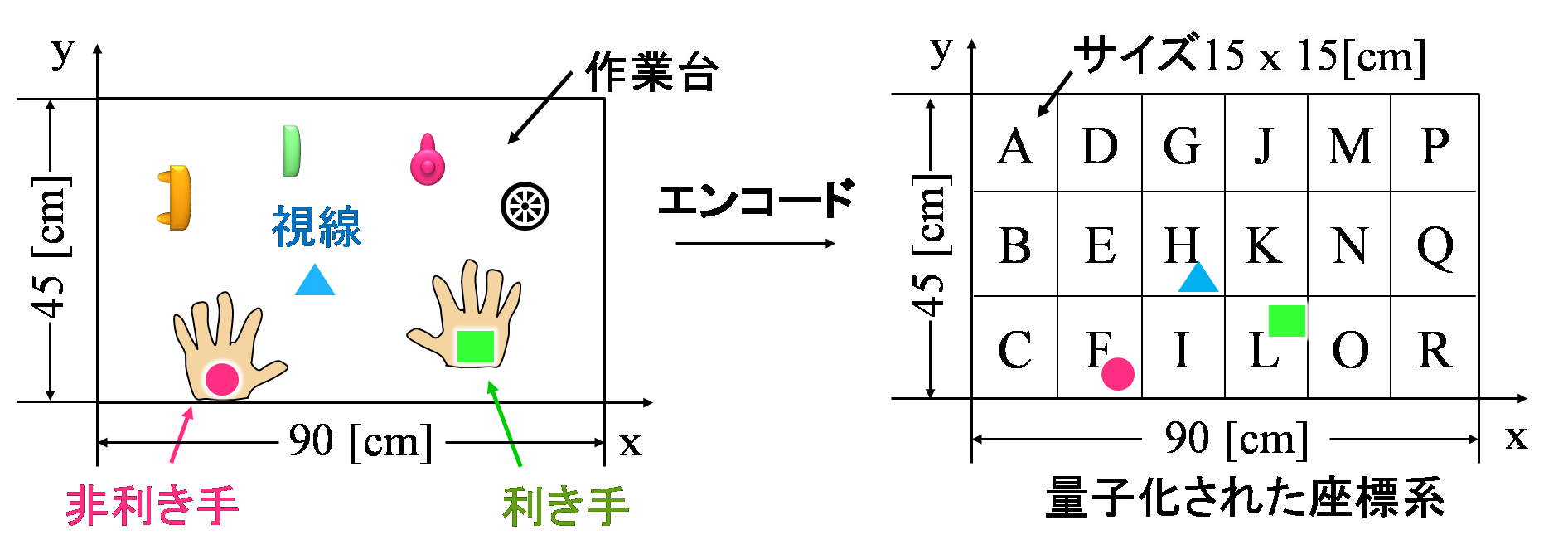 図2 視線と手の位置座標のコード化
図2 視線と手の位置座標のコード化
- 視線・動作統合特徴量の抽出
図3に視線と手のコード列を用いた,視線・動作統合特徴量の抽出方法について示します.本研究では,視線と手の関係性を分析するために,各フレームにおける視線と利き手および視線と非利き手のコードのペアの頻度を算出し,図3に示されているような共起ヒストグラムを2種類生成します.これらのヒストグラムを視線・動作統合特徴量とします.ヒストグラムの横軸が手コード,奥行き軸が視線コード,縦軸がコードのペアの共起確率を示しています.本研究では,この特徴量を熟練度合い向上プロセス分析のための指標とします.
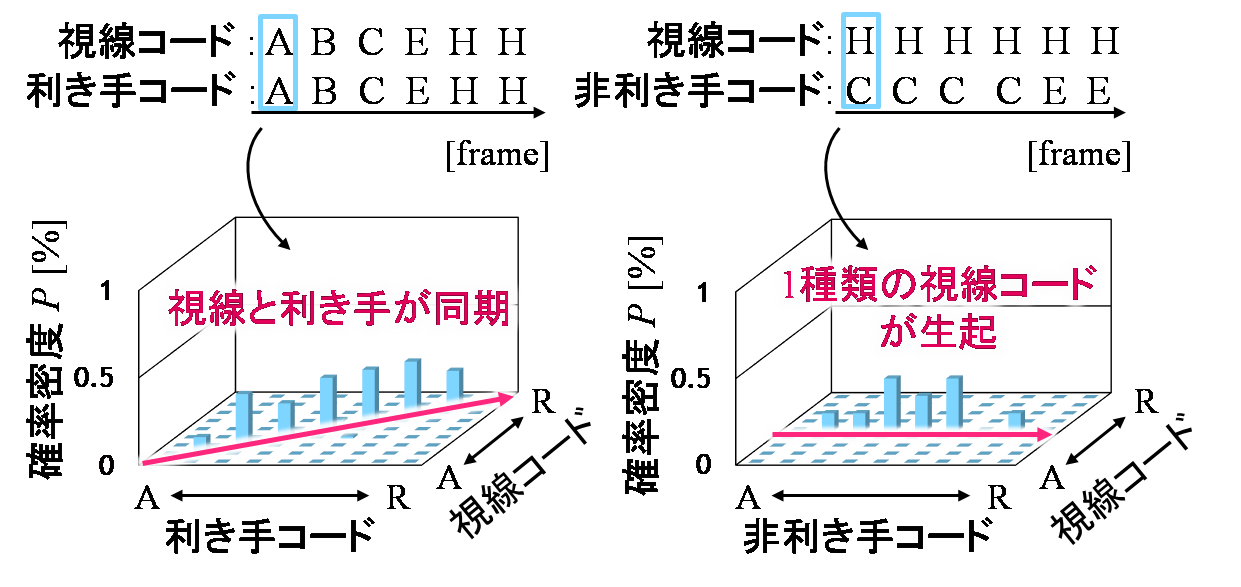 図3 視線・動作統合特徴量の生成方法
図3 視線・動作統合特徴量の生成方法
- 熟練度合い向上プロセスの分析結果
提案特徴量を用いた熟練度合い向上プロセスの分析結果を図4に示します.対象動作では,部品を掴みに行く動作,部品を作業台の中心に運び組付ける動作,ねじを締める動作が含まれる.
図4は,部品を掴みに行く動作の分析結果を示しています.図4より,初級者のヒストグラムは2種類の非利き手コードを有し,中級者と熟練者のヒストグラムは5,6種類の非利き手コードを有しています.このことから,初級者から中級者に習熟する際に,非利き手が多くの領域に動くようになります.
次に,図4より,初級者と中級者のヒストグラムは7,8種類の視線コードを有し,熟練者のヒストグラムは4種類の視線コードを有しています.このことから,初級者と中級者の視線は,さまざまな領域に動いているため,部品の位置まで視線が移動するが,熟練者の視線は,作業台の中心位置で停留することが考えられます.
次に,全ヒストグラムは,5,6種類の利き手コードを有しています.したがって,利き手は,初級者の段階からさまざまな領域に移動し,その動きは,熟練者まで変わらないことが考えられます.これらのことから,初級者と中級者間では,特に非利き手の動きが異なり,中級者と熟練者間では,特に視線の動きが異なることが明確になりました.
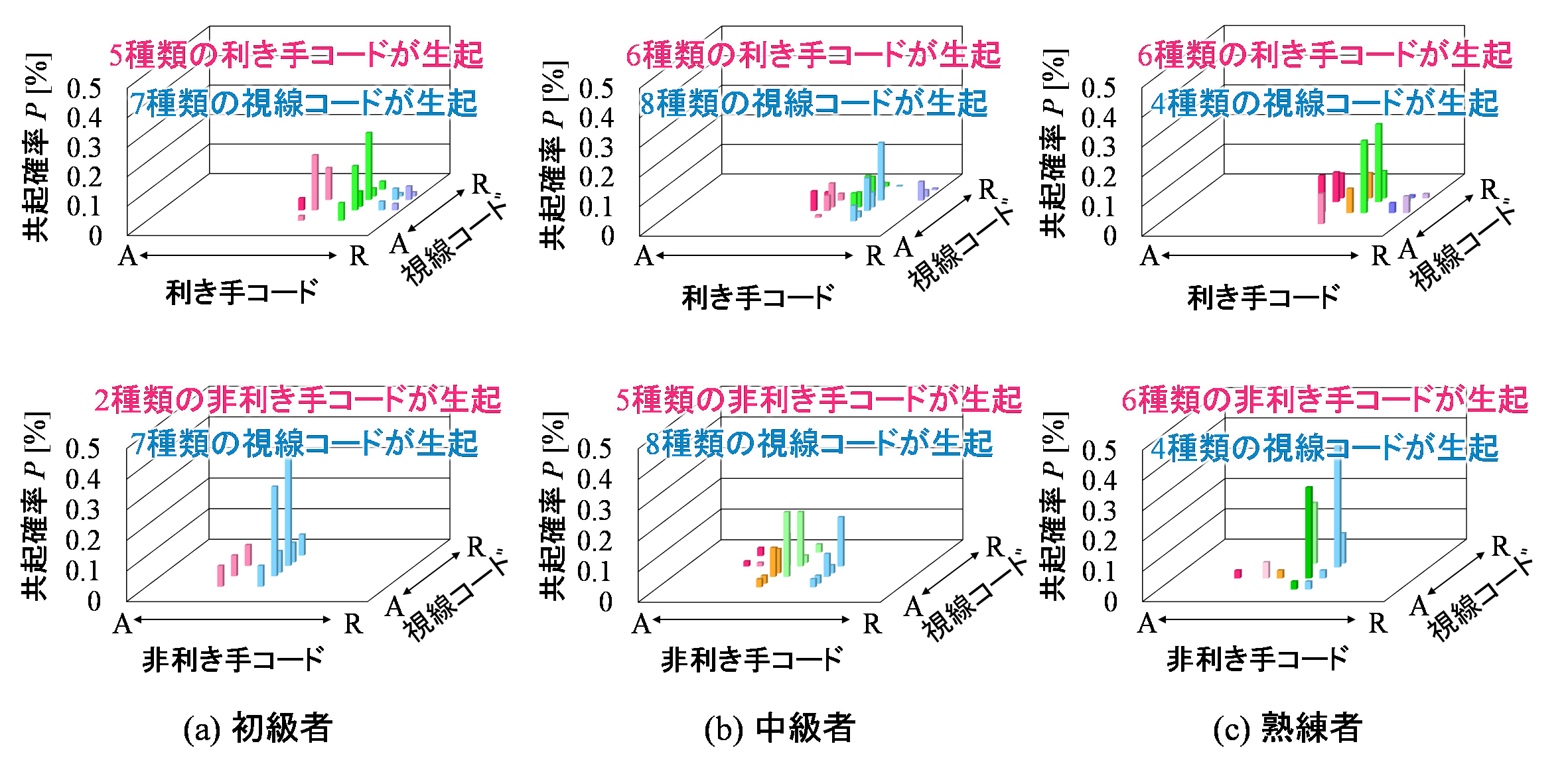
図4 熟練度合い向上プロセスの分析結果
このページの制作: 橋本研究室(川瀬陽平) Copyright 2019 ISL, Chukyo University