Pair Image Database for Scratch Inspection Between Different Imaging Environments
– Overview
This database was created to evaluate the accuracy of the inspection algorithm in different imaging environments during training and inspection. A single rubber plate was captured using three different cameras, and these images are stored in this database. By using this dataset, you can evaluate the robustness of inspection algorithms to differences in imaging environments. As a basic usage example, an inspection algorithm is trained using a dataset captured in one imaging environment (camera_A) and evaluated on datasets captured in different environments (camera_B/camera_C), in order to quantitatively assess robustness to variations in imaging conditions.
When you use this dataset in publications such as conference papers or journal articles, please cite the following URL or reference.
URL:http://isl.sist.chukyo-u.ac.jp/archives/imaging-environment-pair
<Reference>
平松直人,小林大起,秋月秀一,橋本学,理想ペア画像を用いた画像変換に基づく異なるカメラ間ギャップ低減による異常検知の高精度化, 精密工学会誌, Vol91, No.2, pp.185-191, 2025.
– Released Data
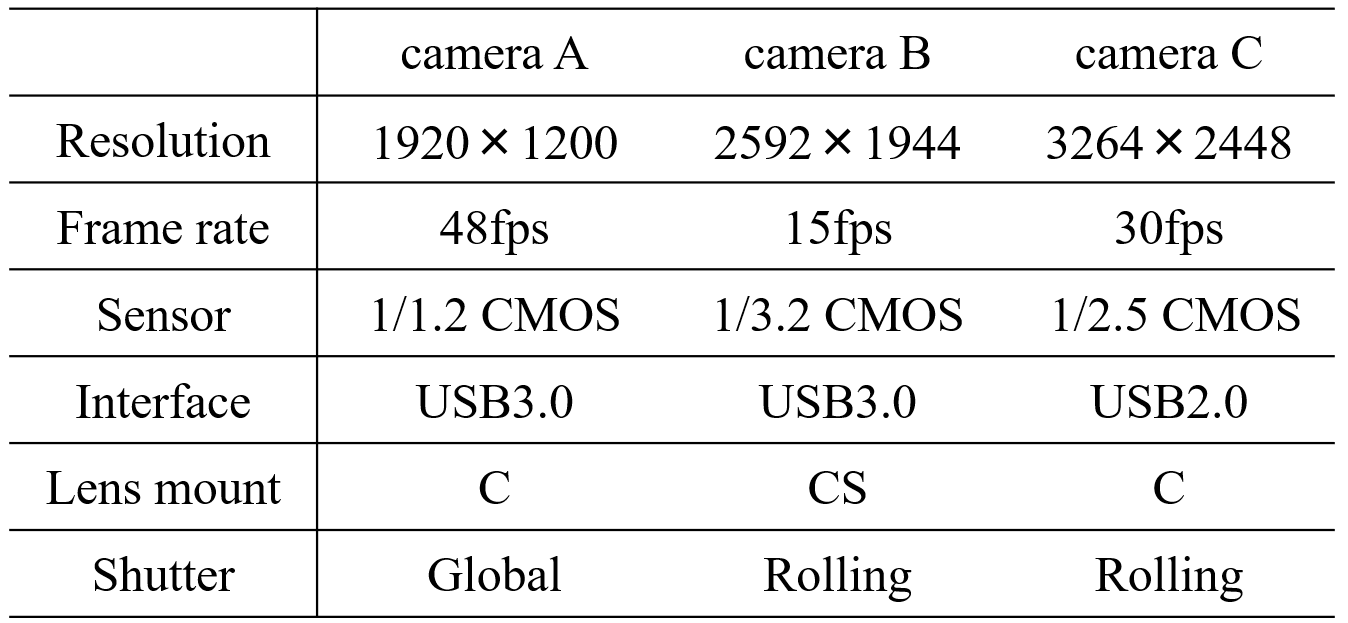
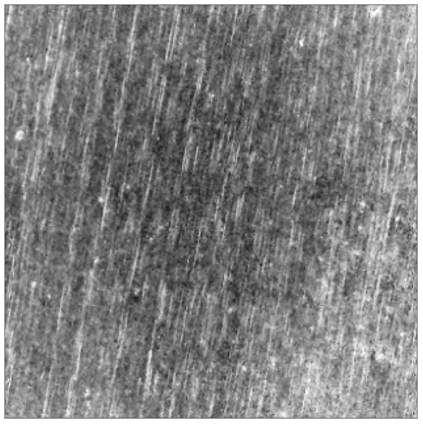
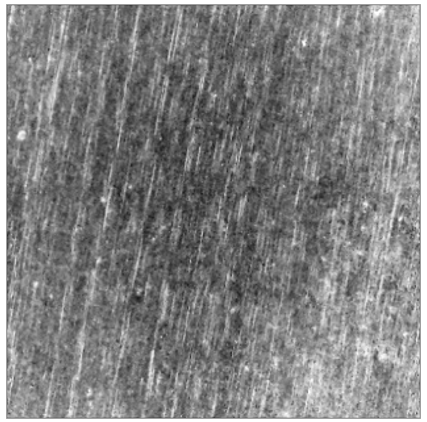
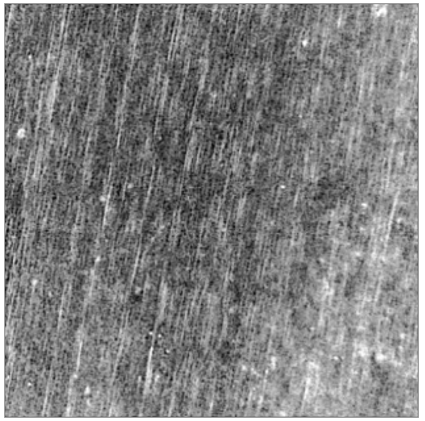
This database consists of images of a rubber surface captured by three cameras with different specifications (e.g., resolution and sensor type), as listed in the table below, under the same object position and orientation. Images from all cameras are resized to match the field of view, centrally cropped to 512×512 pixels, converted to grayscale (512×512, single channel), and provided in PNG format.
Download: Pair Image Database for Scratch Inspection Between Different Imaging Environments (935.9MB)
■Normal(camera_A:250 images,camera_B:250 images,camera_C:250 images 463.7MB)
■Scratch(camera_A:250 images,camera_B:250 images,camera_C:250 images 472.2MB)
– Directory Structure
dataset
|--camera_A
| |--normal
| | |--001.png
| | |--002.png
| |--scratch
| |--001.png
| |--002.png
|
|--camera_B
|--camera_C
The dataset contains 250 normal images and 250 abnormal images (scratch) captured by each of the three cameras: camera_A, camera_B, and camera_C. For evaluating inspection algorithms, we assume a k-fold cross-validation scheme in which the images in the database are divided into k subsets, with one subset used for evaluation and the remaining k−1 subsets used for training.